Типы корпусов микроконтроллеров
Внешних отличий МК от других микросхем нет. Кристаллы размещены в корпусах с определенным количеством выходов. Все МК выпускаются только в 3-х типах корпусов:
- Корпус DIP имеет два ряда выводов. Расстояние между ними 2,54 мм. Выводы вставляются внутрь отверстий на контактных площадках.
- Корпус SOIC. Он подходит для монтажа, который предполагает поверхностную припайку выходов к контактной площадке. Расстояние между выходами 1,27 мм.
- Корпуса QFP (TQFP). Выводы расположены со всех сторон. Расстояние между ними в 3 раза меньше, чем в DIP. Корпус имеет квадратную форму. Предназначаются только для поверхностной пайки.
- Корпус QFN. Самый маленький по сравнению с предыдущими. Контакты выходят в 6 раз чаще, чем в DIP. Имеют большое распространение в промышленном производстве, т. к. позволяют значительно уменьшить габариты выпускаемых приборов.
Каждый из корпусов имеет свои точки применения. Первые 3 могут использоваться радиолюбителями.
Дисплейный модуль на ATMega8/168/328
Опубликовано вт, 05/17/2016 — 18:51 пользователем trol
При разработке микроконтроллерных поделок практически всегда возникает потребность реализации пользовательского ввода и вывода.
Часто функции ввода информации берёт на себя клавиатура (реже — энкодер), а для отображения состояния устройства используются либо светодиоды, либо
светодиодные семисегментные индикаторы, либо ЖК-дисплеи (текстовые вроде 16х2 или графические). Последний вариант часто выигрывает по соотношению
цена/возможности если использовать недорогой экран от телефонов Nokia 5110. Разрешающая способность экрана 84х48 позволяет выводить до 5 строк
текста длиной до 16 символов. Естественно, помимо текста можно выводить и графику. С таким экраном обычно можно реализовать горазо более
удобный пользовательский интерфейс, по сравнению с экранами 16х2, и тем более, по сравнению с семисегментными индикаторами.
Подключение
Через микроконтроллер можно подключить к локальной сети любой девайс. В качестве таковой можно рассмотреть Ethernet. Прежде всего, определимся с понятиями.
Ethernet – это набор стандартов IEEE 802.3, которые описывают разнообразные технологии локальных сетей: общий канальный уровень и набор технологий физического уровня, включающий в себя для передачи информации оптоволокно, витую пару, коаксиал с различными скоростями.
Понять, как работает локальная сеть, можно через модель OSI. Она включает в себя несколько уровней:
- Физический. Состоит из витой пары, драйверов и трансформаторов, по которым происходит передача данных.
- Канальный. Через него передаются Ethernet-фреймы между узлами локальной сети.
- Сетевой. По нему происходит передача пакетов. Они могут передаваться через несколько сетей, различающихся по технологиям физического и канального уровней.
- Транспортный. Связывает узлы между собой. Перед отправкой данных транспортный уровень представляет их в виде пакета сетевого уровня и передает другому узлу. Он может отправлять и группы пакетов одновременно. Если используется протокол с установкой соединения, то перед отправкой транспортный уровень устанавливает соединение, контролирует его качество, а только потом передает пакет данных.
- Прикладной. Решает прикладные задачи, те, ради которых создавался. С внешним миром он обменивается данными по стандартному или эксклюзивному протоколу.
Каждый из последующих уровней обслуживается предыдущим или нижележащим. Так образуются вертикальные межуровневые связи. Особенности обслуживания каждого уровня скрыты от остальных.
При взаимодействии двух сетей каждый из уровней одной сети контактирует с аналогичным уровнем другой. Так образуются горизонтальные связи.
В чем отличие микроконтроллера от микропроцессора?
Весь компьютерный функционал микропроцессора (Micro Processor Unit — MPU) содержится на одном полупроводниковом кристалле. По характеристикам он соответствует центральному процессору компьютера ЦП (Central Processing Unit — CPU). Область его применения – хранение данных, выполнение арифметико-логических операций, управление системами.
МП получает данные с входных периферийных устройств, обрабатывает их и передает выходным периферийным устройствам.
Микроконтроллер совмещает в себе микропроцессор и необходимые опорные устройства, объединенные в одном чипе. Если нужно создать устройство, коммуницирующее с внешней памятью или блоком ЦАП/АЦП, то понадобится только подключить источник питания с постоянным напряжением, цепь сброса и источник тактовой частоты.
Термометр с функцией таймера или управления термостатом
Рейтинг: / 5
- Подробности
- Категория: схемы на PIC
- Опубликовано: 05.03.2019 11:45
- Просмотров: 1914
С. Коряков, г. Шахты Ростовской обл. Описания различных электронных цифровых термометров неоднократно публиковались на страницах журнала «Радио». Как правило, они содержали преобразователь температура—частота и измерительную часть на дискретных цифровых элементах, преобразующих измеренную частоту а показания температуры. Построенный на дискретных элементах преобразователь температура—частота требует калибровки и позволяет достичь приемлемой точности в довольно ограниченном интервале (из-за нелинейности температурных характеристик элементов). Применение современной элементной базы — микроконтроллеров и специальных датчиков — значительно упрощает схемотехнику устройства с одновременным повышением функциональности и точности измерений. Принципиальная схема предлагаемого термометра изображена на рис. 1.
Основы программирования
Прежде чем приступать к программированию МК, нужно выбрать язык. Начинать лучше с Ассемблера. Хотя для понимания он достаточно сложен, но если приложить силы и все-таки понять его логику, то тогда станет ясно, что именно происходит в контроллере.
Если Ассемблер окажется сложен, то можно начинать с Си. Одной из сильных его сторон является то, что он хорошо переносит коды с одного вида МК на другой. Но для этого надо правильно все прописать, разделив рабочие алгоритмы и их реализации в машине по разным частям проекта. Это позволит переносить алгоритм в другой контроллер, переделав всего лишь интерфейсный слой, в котором прописано обращение к «железу», оставив рабочий код без изменений.
Далее действуют по следующей схеме:
- Выбор компилятора и установка среды (подробнее о них писалось выше).
- Запуск среды и выбор в ней нового проекта. Необходимо будет указать место расположения. Путь нужно выбирать наиболее короткий.
- Настройка проекта. Классическим действием будет создание make-файла, в котором прописываются все зависимости. На первой странице указывают еще частоту работы МК.
- Настройка путей. В них надо добавить директорию проекта. В нее можно добавлять сторонние библиотеки.
- Постановка задачи.
- Сборка схемы. На этом этапе надо соединить модуль USB-USART конвертера с аналогичными выводами МК. Это позволит прошить микроконтроллер без программатора. Нужно накинуть джамперы, соединяющие LED1 и LED2. Этим действием мы подключим светодиоды LED 1 и 2 к выводам PD4 и PD5.
- Пропись кода.
- Добавление библиотек и заголовков с определениями.
- Главные функции. Язык Си состоит из одних функций. Они могут быть вложенными и вызываться в любом порядке относительно друг из друга и разными способами. Но все они имеют три обязательных параметра: 1) возвращаемое значение; 2) передаваемые параметры; 3) тело функции. В зависимости отданных, все возвращаемые или передаваемые значения должны быть определенного типа.
- Компиляция и запуск эмуляции.
- Отладка программы.
После того как прописали программу на языке Си, можно понаблюдать, как и что происходит в МК. Это поможет выстроить аналогию с программированием на Ассемблере.
Магнитофон для компьютеров ZX Spectrum
Опубликовано вс, 09/20/2015 — 20:59 пользователем trol
ZX Spectrum — компьютер, созданный более 30 лет назад с 3.5 МГц процессором и всего лишь 48 Кб ОЗУ, под который написано огромное
количество игр (да и прикладного софта тоже), в которые интересно играть даже сегодня. При том, что эти игры часто представляют
собой мегашедевры с точки зрения программирования и оптимизации кода, их разработчики умудрялись вмещать огромные игровые миры
в эти скромные 48 Кб.
Программы в те времена загружались с магнитофонной ленты. Причем, в отличии от самого Spectrum-а, магнитофоны и процесс загрузки с них
вызывают гораздо меньше теплых воспоминаний — загрузка не всегда заканчивалась успешно, иногда игрушку приходилось грузить
по несколько раз получая ошибку «R Tape loading error» регулируя положение головки магнитофона, прочищая ее поверхность одеколоном,
либо, если совсем не повезло, вытаскивать из магнитофона «зажеванную» им кассету при этом с трудом сдерживая желание сильно стукнуть виновника
апстену 🙂
Поделки на базе микроконтроллера AVR
Поделки своими руками на микроконтроллерах AVR становятся популярнее за счет своей простоты и низких энергетических затрат. Что они собой представляют и как, пользуясь своими руками и умом, сделать такие, смотрим ниже.
«Направлятор»
Такое приспособление проектировалось, как небольшой ассистент в качестве помощника тем, кто предпочитает гулять по лесу, а также натуралистам. Несмотря на то, что у большинства телефонных аппаратов есть навигатор, для их работы необходимо интернет-подключение, а в местах, оторванных от города, это проблема, и проблема с подзарядкой в лесу также не решена. В таком случае иметь при себе такое устройство будет вполне целесообразно. Сущность аппарата состоит в том, что он определяет, в какую сторону следует идти, и дистанцию до нужного местоположения.
Важно: прежде чем уходить, нужно сохранить место отправки, куда после надо возвратиться, и стрелка будет показывать на эту точку, но это будет выполнено лишь при условии работы спутников.
Построение схемы осуществляется на основе микроконтроллера AVR с тактированием от наружного кварцевого резонатора на 11,0598 МГц. За работу с GPS отвечает NEO-6M от U-blox. Это, хоть и устаревший, но широко известный и бюджетный модуль с довольно четкой способностью к установлению местонахождения. Сведения фокусируются на экране от Nokia 5670. Также в модели присутствуют измеритель магнитных волн HMC5883L и акселерометр ADXL335.
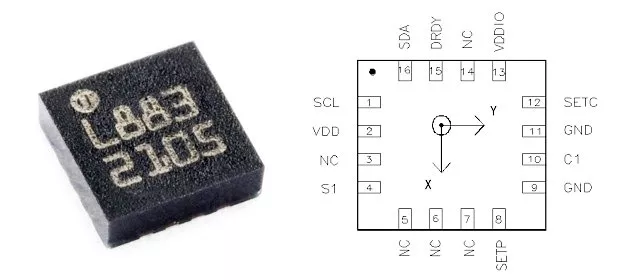 Измеритель магнитных волн HMC5883L
Измеритель магнитных волн HMC5883L
Беспроводная система оповещения с датчиком движения
Полезное устройство, включающее в себя прибор перемещения и способность отдавать, согласно радиоканалу, знак о его срабатывании. Конструкция является подвижной и заряжается с помощью аккумулятора или батареек. Для его изготовления необходимо иметь несколько радиомодулей HC-12, а также датчик движения hc-SR501.
Прибор перемещения HC-SR501 функционирует при напряжении питания от 4,5 до 20 вольт. И для оптимальной работы от LI-Ion аккумулятора следует обогнуть предохранительный светодиод на входе питания и сомкнуть доступ и вывод линейного стабилизатора 7133 (2-я и 3-я ножки). По окончанию проведения этих процедур прибор приступает к постоянной работе при напряжении от 3 до 6 вольт.
 Датчик движения HC-SR501
Датчик движения HC-SR501
Внимание: при работе в комплексе с радиомодулем HC-12 датчик временами ложно срабатывал. Во избежание этого необходимо снизить мощность передатчика в 2 раза (команда AT+P4). Датчик работает на масле, и одного заряженного аккумулятора, емкостью 700мА/ч, хватит свыше, чем на год
Минитерминал
Приспособление проявило себя замечательным ассистентом. Плата с микроконтроллером AVR нужна, как фундамент для изготовления аппарата. Из-за того, что экран объединён с контроллером непосредственно, то питание должно быть не более 3,3 вольт, так как при более высоких числах могут возникнуть неполадки в устройстве.
Преобразователь LM2577
Вам следует взять модуль преобразователя на LM2577, а основой может стать Li-Ion батарея емкостью 2500мА/ч. Выйдет дельная комплектация, отдающая постоянно 3,3 вольта во всём трудовом интервале напряжений. С целью зарядки применяйте модуль на микросхеме TP4056, который считается бюджетным и достаточно качественным. Для того чтобы иметь возможность подсоединить минитерминал к 5-ти вольтовым механизмам без опаски сжечь экран, необходимо использовать порты UART.
История появления
Работы над изобретением микропроцессора велись с начала 1970-х годов. Первой компанией, разработавшей его, была компания Intel. Уже в 1971 году ее был выпущен первый микроконтроллер 4004, который состоял из 2300 полупроводниковых транзисторов, а по размеру был не больше ладони. Это стало возможным, после того как для микросхемы был специально разработан кристалл процессора.
Несмотря на маленькие размеры, производительность микропроцессора не уступала компьютеру Eniac, имеющему габариты в 85 м3. Особенностью этого устройства было то, что оно могло обрабатывать только 4 бита информации.
В ближайшие полгода еще несколько компаний заявили о создании аналогичных изделий.
К концу 1973 года Intel выпускает 8-зарядный микропроцессор. Он был настолько удачно разработан, что и сегодня считается классикой.
Через несколько месяцев фирма Motorola выпускает свой 8-битовый микропроцессор 6800. Он стал сильным конкурентом интеловской микросхеме, т. к. имел более значительную систему прерываний и одно напряжение электропитания. В 8080 их было три.
Внутренняя архитектура 6800 тоже отличалась. В ней не было регистров общего назначения, в которых могли сохраняться как адресная информация, так и числовые показатели. Вместо них, в процессоре появился еще один полноценный аккумулятор для обработки данных и 16-разрядные регистры для хранения адресов. Работа с памятью у 6800 выполнялась быстрее и была проще, но 8080 тратил меньше времени на обмен внутренней информацией между регистрами.
Оба эти изделия имели как положительные стороны, так и недоработки. Они стали родоначальниками двух больших семейств микропроцессоров – Интел и Моторола, которые конкурируют между собой до сих пор.
В 1978 году Интел выпустила 16-разрядный микропроцессор, который IBM использовала для разработки персональных компьютеров. Моторола не отстала от своего конкурента и тоже выпустила 16-разрядный микропроцессор, который использовали Atari и Apple.
Сейчас существует более 200 разновидностей микроконтроллеров. Количество компаний, их изготавливающих, перевалило за два десятка. Широкое распространение у разработчиков получили:
- 8-битные микроконтроллеры Pic компании Microchip Technology и AVR от Atmel;
- 16-битовые MSP 430 фирмы TI;
- 32-битные ARM от одноименной компании.
Как подключить кнопку или светодиод к микроконтроллеру
Если говорить о взаимодействии с внешней средой, то в качестве самостоятельного устройства микроконтроллер не представляет особого интереса — просто что-то там внутри сам с собой тикает. А если вы решите отобразить его действия, то уже станет интереснее.
Светодиод или кнопку можно подключить используя ряд нехитрых операций:
Для кнопки необходимо выбрать ножку I/O, и произвести ее подключение при помощи кнопки на землю. Конфигурация самого вывода будет представлять собой DDRxy=0 PORTxy=1 (вход с подтяжкой).
При этом, если кнопка не находится в нажатом положении, при помощи подтягивающего резистора, вход будет иметь большое напряжение, а из бит PINху при чтении мы получим 1. При нажатой кнопке, вход будет на земле, а напряжение на этом входе упадет до нулевого, из PINxy будет прочитываться 0. По нулевым позициям в битах PINх регистра нам становится известно о нажатом состоянии кнопки.
Пунктиром выделен еще один подтягивающий резистор. Хотя внутри AVR возможно подключение к порту подтяжки, она будет ненадежной: 100 кОм. Поэтому она может быть просто придавлена к земле при помощи наводки или помехи, что даст ложное срабатывание. Для хорошей схемы необходима внешняя подтяжка на 10 кОм.
Способы подключения светодиода к порту
Всего существуют 2 схемы:
- Порт-Питание;
- Порт-земля.
В первом случае диод зажигается при выдаче в порт логический ноль: уровень низкий (близок к нулю). При втором способе, чтобы диод зажегся, следует выдать в порт логическую единицу: уровень высокий, приравненный к значению VCC.
Для AVR подходит любой их этих способов, но старые модели МК тянули вниз лучше, поэтому Порт-Питание более популярен. Настройка вывода порта на выход для светодиода (DDRxy=1), при этом, зависимо от параметра в PORTxy ножка будет иметь либо низкое либо высокое напряжение.
Производить подключение светодиода следует через резистор. Так как уровень прямого сопротивления светодиода небольшой. И при отсутствии лимитов проходящего сквозь него тока, он может сгореть, а также прожечь вывод МК. Для нормальной работы светодиода достаточно примерно 3…15 мА.
Охранное устройство с управлением ключами-«таблетками» iBUTTON
Рейтинг: / 5
- Подробности
- Категория: схемы на PIC
- Опубликовано: 10.03.2019 11:07
- Просмотров: 878
А. Воскобойников, г. Смоленск
О ключах-«таблетках» iButton фирмы Dallas Semiconductors (США) мы уже рассказывали в статье А. Синюткина «Электронный замок на ключах-«таблетках» iButton» («Радио», 2001, № 2, 3). Автор предлагаемой статьи использовал эти ключи для управления охранной сигнализацией. Предлагаемое устройство может выполнять функции охранной сигнализации или просто включать освещение при движении человека в помещении и при открывании входной двери. Его схема показана на рис. 1.
Основные аспекты программирования микроконтроллера AVR
Кодирование микроконтоллеров зачастую производят в стиле ассемблера или СИ, однако, можно пользоваться и другими языками Форта или Бейсика. Таким образом, чтобы по факту начать исследование по программированию контроллера, следует быть оснащенным следующим материальным набором, включающим в себя: микроконтроллер, в количестве три штуки — к высоковостребованным и эффективным относят — ATmega8A-PU, ATtiny2313A-PU и ATtiny13A- PU.
Чтобы провести программу в микроконтроллер, нужен программатор: лучшим считают программатор USBASP, который дает напряжение в 5 Вольт, используемое в будущем. С целью зрительной оценки и заключений итогов деятельности проекта нужны ресурсы отражения данных − это светодиоды, светодиодный индуктор и экран.
Программатор USBASP 2.0
Чтобы исследовать процедуры коммуникации микроконтроллера с иными приборами, нужно числовое приспособление температуры DS18B20 и, показывающие правильное время, часы DS1307
Также важно иметь транзисторы, резисторы, кварцевые резонаторы, конденсаторы, кнопки
С целью установки систем потребуется образцовая плата для монтажа. Чтобы соорудить конструкцию на микроконтроллере, следует воспользоваться макетной платой для сборки без пайки и комплектом перемычек к ней: образцовая плата МВ102 и соединительные перемычки к макетной плате нескольких видов — эластичные и жесткие, а также П-образной формы. Кодируют микроконтроллеры, применяя программатор USBASP.
Что нужно для программирования микроконтроллера
Путь программирования проходит несколько этапов:
- Перед тем как приступить к написанию кода программы, надо определиться с конечной целью.
- Составляется алгоритм работы программы.
- Непосредственное написание кода программы. Коды пишутся на языке Си или Ассемблере.
- Компиляция программы, т. е. перевод ее в двоичную или шестнадцатеричную систему 1 и 0. Только так ее сможет понять МК.
- Откомпилированный код записывают в память контроллера.
- Прошивают МК с помощью программатора. Они бывают двух типов подключения: через COM или USB порт. Самый простой и дешевый программатор USBASP.
- Тестирование и отладка МК на реальном устройстве.
Радиолюбители иногда обходятся без прописывания алгоритма работы программы на бумаги. Они держат его в голове.
Частотомер-тестер кварцев на atmega8
Опубликовано чт, 01/18/2018 — 19:49 пользователем trol
Частотомер — полезный прибор в лаборатории радиолюбителя (особенно, при отсутствии осциллографа).
Кроме частотомера лично мне часто недоставало тестера кварцевых резонаторов — слишком много стало приходить брака из Китая. Не раз случалось такое,
что собираешь устройство, программируешь микроконтроллер, записываешь фьюзы, чтобы он тактировался от внешнего кварца и всё — после записи фьюзов
программатор перестаёт видеть МК. Причина — «битый» кварц, реже — «глючный» микроконтроллер (или заботливо перемаркированый китайцами с добавлением,
например, буквы “А» на конце). И таких неисправных кварцев мне попадалось до 5% из партии.
Кстати, достаточно известный китайский набор частотомера с тестером кварцев на PIC-микроконтроллере и светодиодном дисплее с Алиэкспресса мне
категорически не понравился, т.к. часто вместо частоты показывал то ли погоду в Зимбабве, то ли частоты «неинтересных» гармоник
(ну или это мне не повезло).
Цифровой термостат
Рейтинг: / 5
- Подробности
- Категория: схемы на PIC
- Опубликовано: 02.05.2018 07:49
- Просмотров: 2568
Это термостат универсального назначения. Он управляет электронагревателем и следит за температурой в месте расположения его температурного датчика. А так же на жидкокристаллическом дисплее показывает фактическую температуру. Температуру, которую необходимо поддерживать можно установить в пределах от -25 до +75°С с шагом в 0,25°С. Кроме того можно установить и необходимый гистерезис, в пределах которого температура должна поддерживаться. Гистерезис устанавливается шагами по 0,1°С.
Микроконтроллер и его предназначение
Микроконтроллер − это чип, целью которого является управление электрическими приборами. Классический контроллер совмещает в одном кристалле, как работу процессора, так и удаленных приборов, и включает в себя оперативное запоминающее устройство. В целом, это монокристальный персональный компьютер, который может осуществлять сравнительно обыкновенные задания.
Разница между микропроцессором и микроконтроллером заключается в наличии встроенных в микросхему процессора приборов «пуск-завершение», таймеров и иных удаленных конструкций. Применение в нынешнем контроллере довольно сильного вычисляющего аппарата с обширными способностями, выстроенного на моносхеме, взамен единого комплекта, существенно уменьшает масштабы, потребление и цену созданных на его основе приборов.
Из этого следует, что применить такое устройство можно в технике для вычисления, такой, как калькулятор, материнка, контроллеры компакт-дисков. Используют их также в электробытовых аппаратах – это и микроволновки, и стиральные машины, и множество других. Также микроконроллеры широко применяются в индустриальной механике, начиная от микрореле и заканчивая методиками регулирования станков.
Микроконроллеры AVR
Ознакомимся с более распространенным и основательно устоявшимся в современном мире техники контроллером, таким как AVR. В его состав входят высокоскоростной RISC-микропроцессор, 2 вида затратной по энергии памяти (Flash-кэш проектов и кэш сведений EEPROM), эксплуатационная кэш по типу RAM, порты ввода/вывода и разнообразные удаленные сопряженные структуры.
Важно:
- рабочая температура составляет от -55 до +125 градусов Цельсия;
- температура хранения составляет от -60 до +150 градусов;
- наибольшая напряженность на выводе RESET, в соответствии GND: максимально 13 В;
- максимальное напряжение питания: 6.0 В;
- наибольший электроток линии ввода/вывода: 40 мА;
- максимальный ток по линии питания VCC и GND: 200 мА.
Возможности микроконтроллера AVR
Абсолютно все без исключения микроконтроллеры рода Mega обладают свойством самостоятельного кодирования, способностью менять составляющие своей памяти драйвера без посторонней помощи. Данная отличительная черта дает возможность формировать с их помощью весьма пластичные концепции, и их метод деятельности меняется лично микроконтроллером в связи с той либо иной картиной, обусловленной мероприятиями извне или изнутри.
Обещанное количество оборотов переписи кэша у микроконтроллеров AVR второго поколения равен 11 тысячам оборотов, когда стандартное количество оборотов равно 100 тысячам.
Конфигурация черт строения вводных и выводных портов у AVR заключается в следующем: целью физиологического выхода имеется три бита регулирования, а никак не два, как у известных разрядных контроллеров (Intel, Microchip, Motorola и т. д.). Это свойство позволяет исключить потребность обладать дубликатом компонентов порта в памяти с целью защиты, а также ускоряет энергоэффективность микроконтроллера в комплексе с наружными приборами, а именно, при сопутствующих электрических неполадках снаружи.

Всем микроконтроллерам AVR свойственна многоярусная техника пресечения. Она как бы обрывает стандартное течение русификатора для достижения цели, находящейся в приоритете и обусловленной определенными событиями. Существует подпрограмма преобразования запрашивания на приостановление для определенного случая, и расположена она в памяти проекта.
Когда возникает проблема, запускающая остановку, микроконтроллер производит сохранение составных счетчика регулировок, останавливает осуществление генеральным процессором данной программы и приступает к совершению подпрограммы обрабатывания остановки. По окончании совершения, под шефствующей программы приостановления, происходит возобновление заранее сохраненного счетчика команд, и процессор продолжает совершать незаконченный проект.
Устройства на микроконтроллерах
Каждый из видов контроллеров имеет свои периферические устройства, которые работают автономно, т. е. независимо от центрального ядра. После того как периферийное устройство выполнит свою задачу, оно может сообщить об этом ЦП, а может и не сообщать. Это зависит от того, как оно запрограммировано.
На МК могут быть следующие устройства:
- Аналоговый компаратор. Основная его задача сравнивать поступающее (измеряемое) напряжение с идеальным. Если измеряемое напряжение выше, чем идеальное, то компаратор выдает сигнал логической 1 (прибор отключается), если ниже, то логический 0 (прибор продолжает работать).
- Аналогово-цифровой преобразователь (АЦП). Измеряет аналоговое напряжение в период времени и выдает его в цифровой форме. Есть не у всех МК.
- Таймер/счетчик. Представляет собой сочетание 2-х форм таймера и счетчика. Таймер формирует интервалы времени, а цифровой счетчик считает количество импульсов, идущих от внутреннего генератора частот, или сигналы от внешних источников. Одним из представителей работы таймера /счетчика может быть ШИМ (широтно-импульсный модулятор). Он предназначен для управления средним значением напряжения при нагрузке.
- Сторожевой таймер. Его задача перезапускать программу через определенный временной промежуток.
- Модуль прерываний. Он сообщает МК о наступлении какого-либо события и прерывает выполнение программы. После завершения события возобновляет прерванную программу.
Не все из этих периферийных устройств обязательно есть в каждом МК. Существуют и другие, менее распространенные устройства.
Управление по току с пропорциональным управлением
При этом способе управления переменная скважность ШИМ зависит от выходного напряжения и активного фильтра обратной связи
Рис. 12. ШИМ контроллер с управлением по току с пропорциональным управлением. Вариант с фиксированным и с регулируемым выходным напряжением.
В данном методе наблюдается нестабильность петли обратной при скважности выше 50% (появление генерации на частоте ½ Fswx, зависит от шума на Vin или Vout). Данный процесс хорошо изучен и проблема решается уменьшением усиления в петле обратной связи, что можно обеспечить двумя способами (рис.13):
- добавлением пилообразного напряжения к Isense;
- вычитанием пилообразного напряжения из выхода петлевого фильтра.
Рис.13. Добавление модуля формирования пилообразного напряжения (PRG) в ШИМ контроллер для устранения нестабильности петли обратной связи. Вариант с фиксированным и с регулируемым выходным напряжением.
Контроллеры Microchip для преобразователей энергии, как составную часть CIP имеют программируемый генератор пилообразного напряжения (Programmable Ramp Generator, PRG или Slope Compensation).
Модуль PRG позволяет формировать пилообразное напряжение с независимой регулировкой фронта и спада, в качестве запускающих сигналов могут использоваться различные внутренние и внешние сигналы.
Управление по напряжению (Voltage Mode)
В этом режиме скважность ШИМ сигнала, управляющего силовыми ключами, определяется непосредственно выходным напряжением. При гистерезисном управлении, если напряжение на выходе ниже нормы – идет «накачка» источника
Если напряжение на выходе больше порога – компаратор блокирует управление силовым ключом, идет разряд выходной накопительной емкости. В англоязычной литературе такой режим называют «hiccup-mode» – «режим с икотой»
При гистерезисном управлении, если напряжение на выходе ниже нормы – идет «накачка» источника. Если напряжение на выходе больше порога – компаратор блокирует управление силовым ключом, идет разряд выходной накопительной емкости. В англоязычной литературе такой режим называют «hiccup-mode» – «режим с икотой».
Данный режим используется сравнительно редко, так как сопровождается большими пульсациями выходного напряжения и требует накопительного конденсатора сравнительно высокой емкости.
Рисунок 5 демонстрирует принцип работы режима управления по напряжению с гистерезисным управлением. Здесь и далее не показана выходная часть источника, так как определяется топологией, выходной мощностью и др. Для иллюстрации принципа работы ШИМ-контроллера иногда будет показан пример с выходной частью.
Рис. 5а. Первая схема – с фиксированным выходным напряжением, вторая – с регулировкой выходного напряжения.
Рис. 5б. Диаграммы выхода ШИМ и выхода компаратора.
Рис. 6. Пример выходного каскада повышающего импульсного источника питания, подключенного к ШИМ контроллеру (см.рис.5).
Конфигурируемые логические ячейки (CLC) на рис .5 можно включить как элемент И. Для предотвращения высокочастотной генерации от компаратора его выход целесообразно пропустить через еще одну CLC – D-триггер с синхронизацией от сигнала ШИМ
В этом случае получим два «бонуса» — отсутствие возникновения высокочастотной генерации и неизменность скважности управляющего ШИМ (см. пояснения на рис
7). Подробнее о конфигурируемых логических ячейках см. в статье «Конфигурируемые логические ячейки в PIC микроконтроллерах» .
Рис.7.а. Укорочение управляющих ШИМ импульсов, возможность появления высокочастотной генерации
Рис. 7.б. Синхронизация сигналов позволяет предотвратить укорочение ШИМ импульсов
Рис. 8. Синхронизация сигналов для предотвращения генерации и укорочения ШИМ.