Серия HandySCAN BLACK: скорость, измерения метрологического класса, универсальность
Серия BLACK является флагманом линейки HandySCAN 3D, отраслевого стандарта портативного 3D-сканирования метрологического класса. Эти сканеры были разработаны для трех конкретных групп пользователей. Это:
-
инженеры по разработке продукции, которым необходимо внедрять инновации и разрабатывать изделия сложной формы, чтобы предлагать лучшие и конкурентоспособные решения;
-
группы контроля качества и производственные отделы, в чьи задачи входит оптимизировать производственный процесс, выявлять и устранять возникающие проблемы и избегать простоев;
-
специалисты по контролю качества, которые должны проверять, были ли выполнены требования клиентов, и подтверждать, что детали соответствуют своему назначению для конечных пользователей.
Скорость
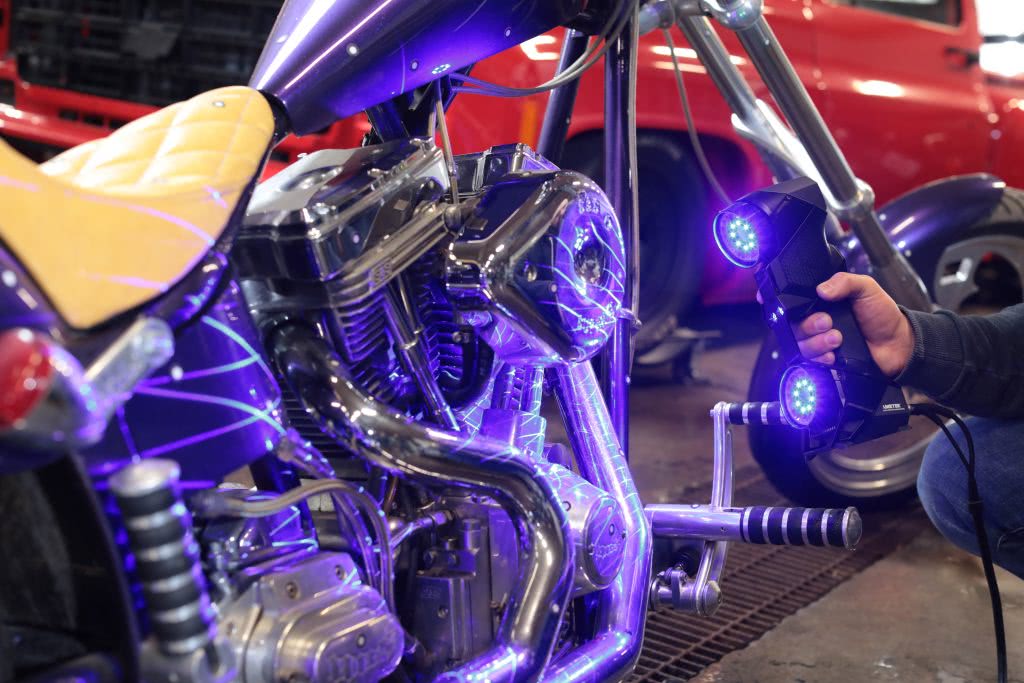
Благодаря 11 синим лазерным блокам в сочетании с камерами высокого разрешения и оригинальными оптическими компонентами сканер может выполнять до 1,3 млн измерений в секунду. Сравнимая с Go!SCAN SPARK скорость всего процесса измерения, от настройки до создания сетки, позволяет экономить драгоценное время сбора и анализа данных.
https://youtube.com/watch?v=KRYgXSwzf3I
3D-сканирование метрологического класса
Принадлежность к метрологическому классу говорит о высоком качестве сканирования, точности и надежности измерений. Сканер HandySCAN BLACK сертифицирован по ISO 17025 и соответствует стандарту VDI/VDE 2634 часть 3 (Германия), а точность устройства составляет 0,025 мм (с объемной точностью 0,02 мм ± 0,04 мм/м). Поскольку разрешение увеличено в четыре раза по сравнению с серией SILVER, серия BLACK идеально подходит для сканирования объектов с высоким уровнем детализации, таких как небольшие детали из пластика или листового металла.
Высокая гибкость
Если коротко, HandySCAN BLACK – это по-настоящему универсальные 3D-сканеры. Благодаря адаптируемой области и неограниченному объему сканирования устройство может измерять любую деталь независимо от размера, формы, качества поверхности и сложности. Кроме того, сканеры имеют несколько синих лазеров, что как нельзя лучше подходит для измерения сложных поверхностей.
PART 4 — Point cloud to STL
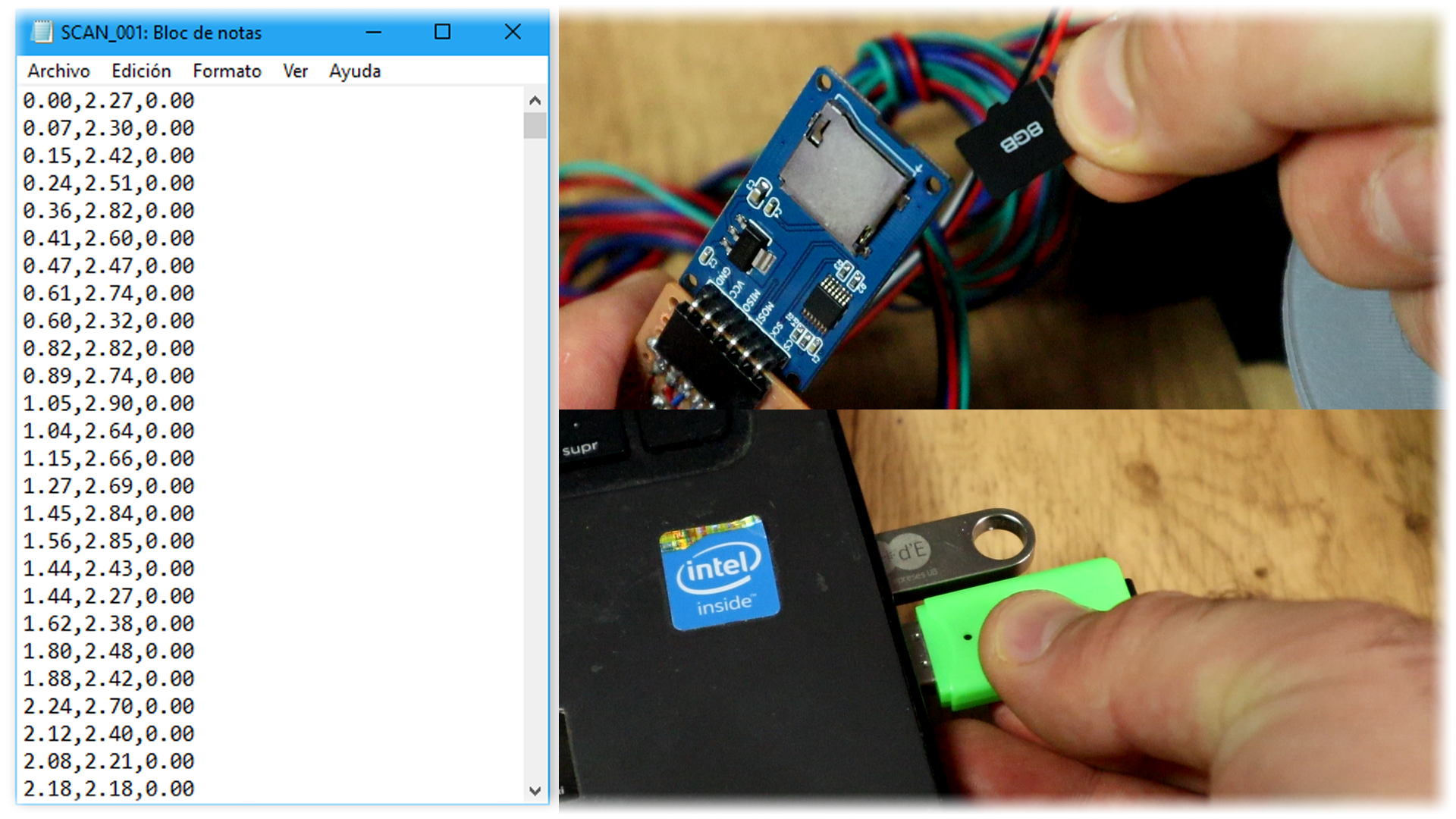
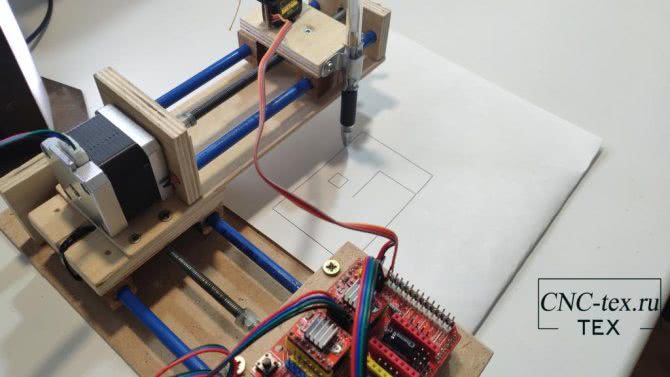
Place the object on the turntable in the middle. Connect power supply and wait for theamchine to home itself. When reached, press the scanning push button and wait. Depending on the layer height you choose and object size it will take more or less to complete. Once complete, remove the SD card.
Remove the SD card and copy the file to your PC. The file should have the next format. Three columns separated by a comma with the values of the x, y,and z coordinates. This are just points in a format of a point cloud. To obtain an STL file, we use the MESHLAB software which you could download from a link below.
MESHLAB software (windows): 
Use MESHLAB
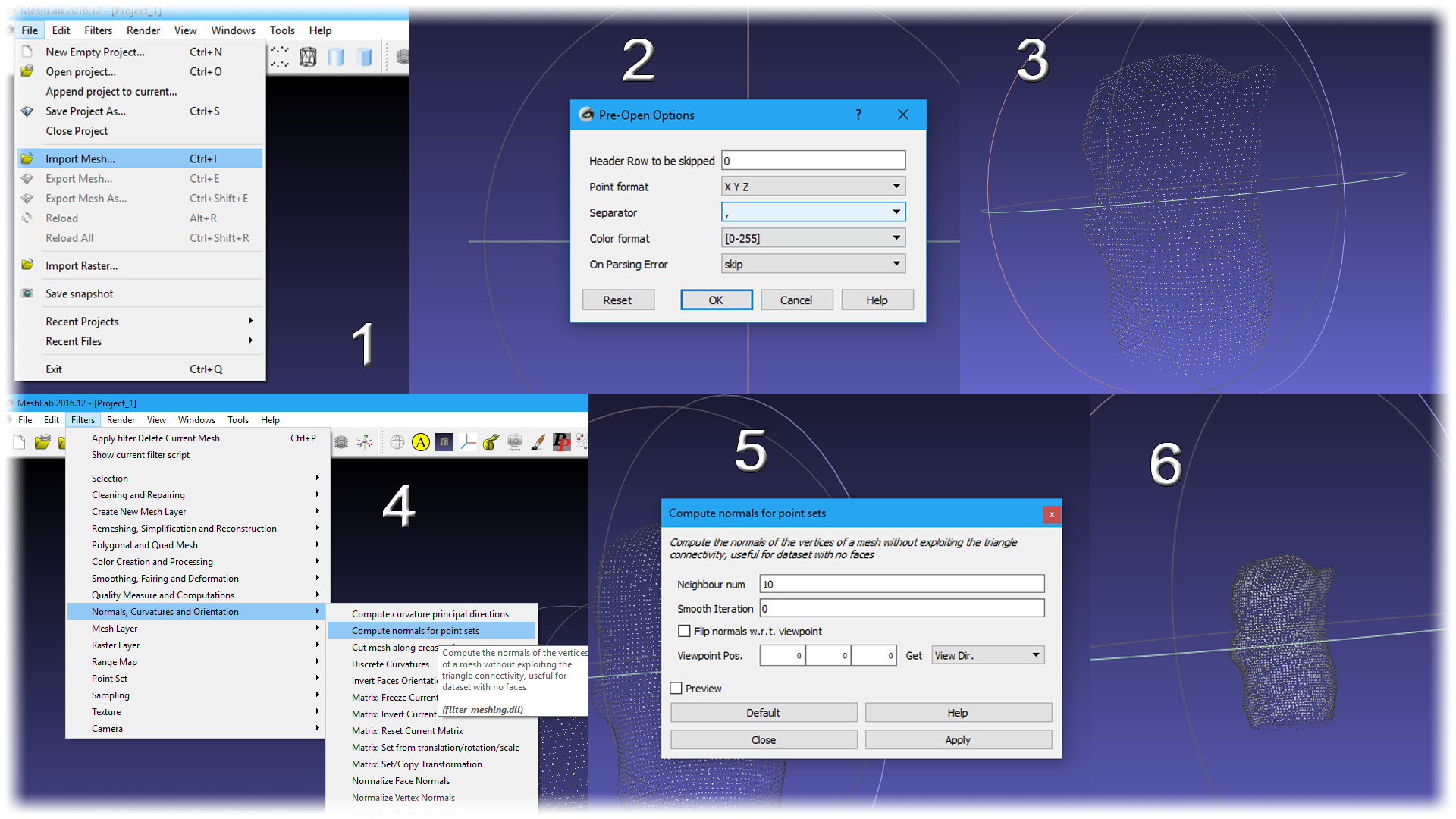
Now go to filter, remeshing simplification and reconstruction and here select screened poisson surface reconstruction. Play with the settings if you want and then click apply. Close the window and there we have our file.
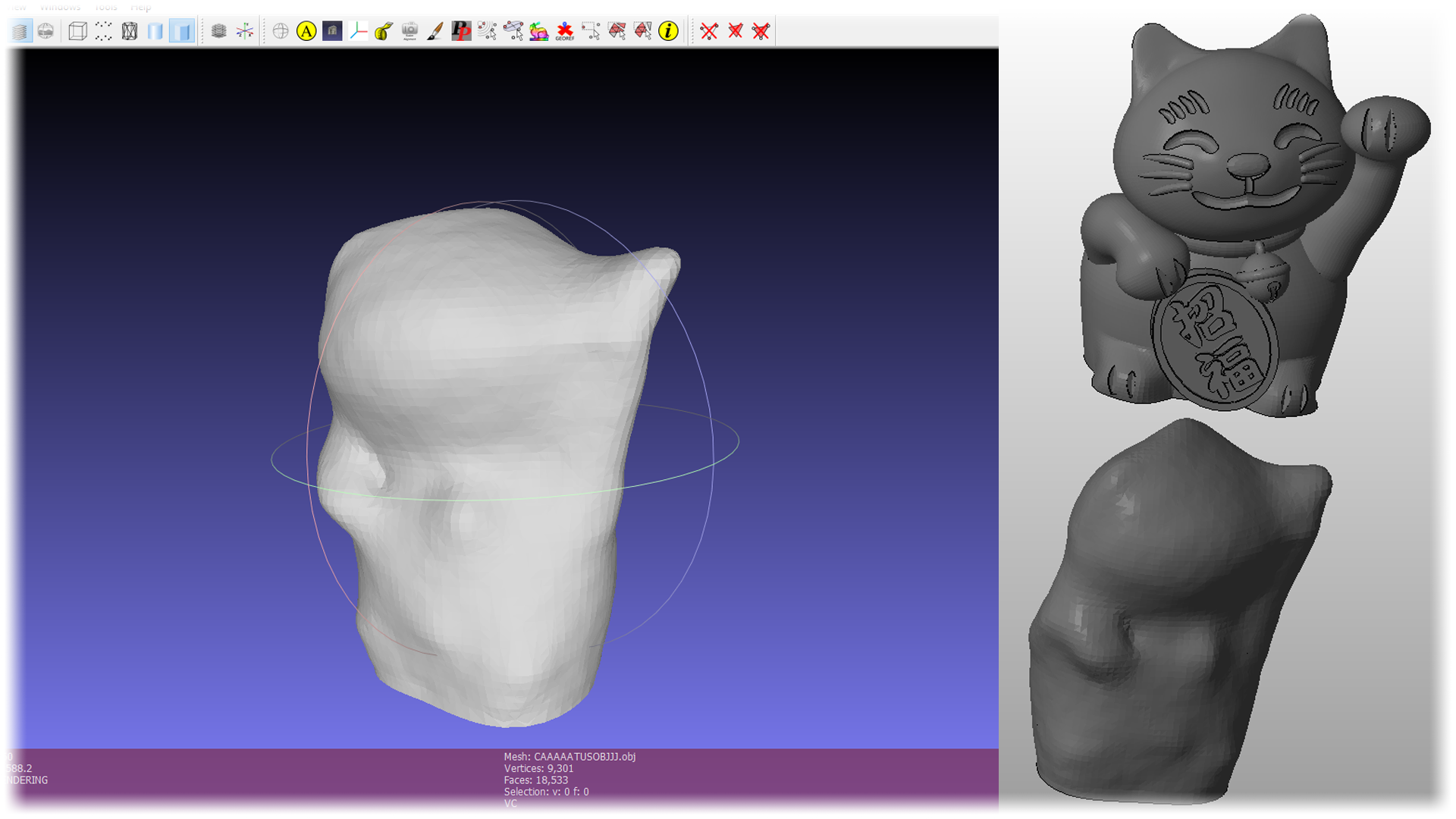
Now, the file was scanned. The precision is not that good. For learning purposes, this project is more than enough.
So, there you have it guys. The precision could get better using a better distance sensor. Maybe a laser based one would give better precision. Also have in mind that in the code, the sensor makes 40 measurements and give the mean of those in order to increase precision. Consider using a lead screw instead of a normal threaded rod, better sensor, more measurements, add an end stop switch and improve this project however you want. Help me on PATREON.
See more tutorials
Help me by sharing this post
ЧПУ станок своими руками на базе arduino. Пошаговая инструкция + видео
Все мои статьи с видео про создание ЧПУ станков на одной странице. Своего рода инструкция.
Данная страница будет пополняться. Не забудьте добавить ее в закладки!
UniversalG-Code Sender программа для управления ЧПУстанком.Проект №7. ЧПУ плоттер на Arduino своими руками.
- ЧПУ плоттер на Arduino своими руками.
- G-Code для плоттера на Arduino.
- Красивые эффекты изображений для рисования на ЧПУ плоттере.
- Прошивка для плоттера GRBL Servo и работа с программой LaserGRBL.
- Установка и настройка конечных выключателей на 2 осевой ЧПУ станок – GRBL.
Проект №6. Лазерный гравер на ESP32. Прошивка GRBL_ESP32.
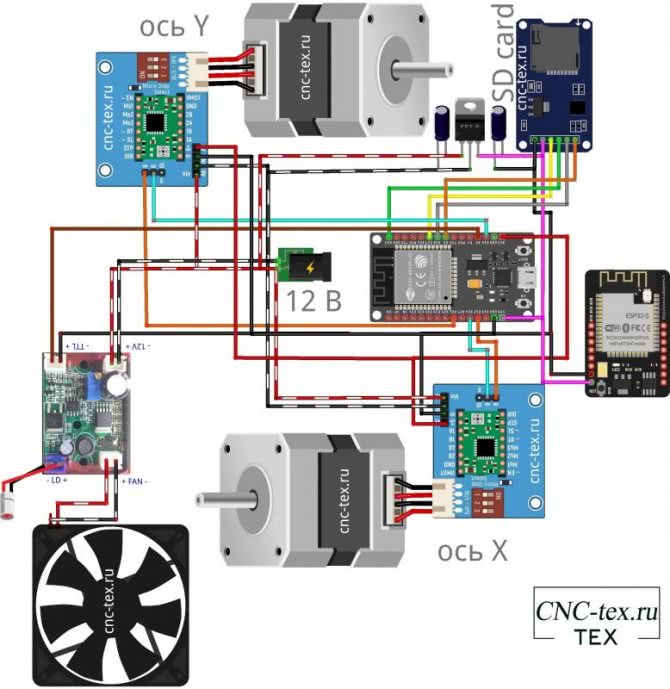
- Лазерный гравер на ESP32. Прошивка GRBL_ESP32.
- GRBL ESP32 подключаем двигателя, шпиндель, SD карту.
- Установка и настройка GRBL ESP32
Проект №5. Самодельный Лазерный гравёр с ЧПУ, в домашних условиях
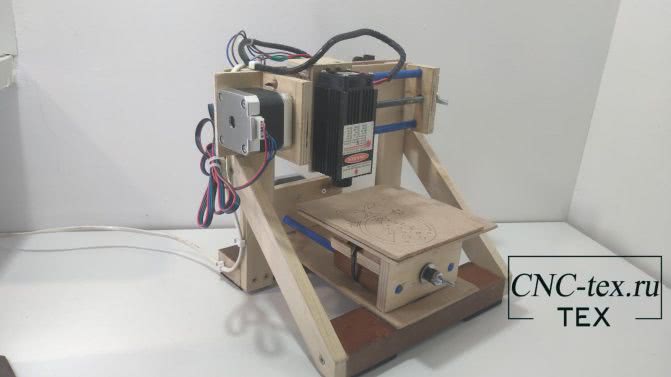
Самодельный Лазерный гравёр с ЧПУ, в домашних условиях.
Электроника лазерного гравера. Arduino UNO, CNC shield v3, ttl laser driver.
Установка grbl 1.1 на Arduino uno. Основы работы в программе LaserGRBL.
Проект №4. Самодельный ЧПУ фрезерный станок на Arduino с дисплеем

Обзор панели управления самодельного ЧПУ. Запуск фрезерования.
Самодельный ЧПУ фрезерный станок на Arduino с дисплеем
Проект №3. Самодельный CNC станок из мебельных направляющих на базе Arduino UNO

Получив опыт создания самодельных ЧПУ станков. Определился с какой электроникой мне проще работать. Решил вложить немного денег и с делать фрезерный CNC станок на мебельных направляющих .
- Самодельныйстанок с ЧПУ цена. Калькуляция стоимостифрезерного станка
- Модернизациясамодельного станка с ЧПУ: выравниваюстолешницу и пр.
- Настройкапрошивки Grbl ЧПУ станка. Калибровка ЧПУ
- СамодельныйЧПУ CNC фрезерный станок. Часть 2. Электроника
- Самодельныйфрезерный ЧПУ станок из мебельныхнаправляющих. Механика
Заготовке вырезанные на данном ЧПУ станке можно посмотреть тут……
Готовые проекты сотрите тут…
Комплектующие ЧПУ :
- Ходовой винт с гайкой
- Nemo 17 + провода
- Муфта 5мм на 8 мм
- Кнопки
- Arduino
- CNC shield v3 + A4988
- Конечный выкл
- AC-DC 12 В 7A Источник питания
- Гравер электрический ВИХРЬ Г-160ГВ
Механика для ЧПУ недорого >>>
Расходные материалы для CNC >>>
Проект №2. Лазерный гравировальный станок с ЧПУ (шаговые двигателя от матричного принтера)

После своего первого опыта в разработке ЧПУ станков, решил собрать самодельный лазерный гравировальный ЧПУ станок . По моим подсчетам данный станок самый простои и дешевый по комплектующим. Собирал я его поэтапно и снимал видео инструкцию по сборке ЧПУ . Все моменты сборки ЧПУ не возможно осветить, но я постарался рассказать про основные.
Для управления использовал электронику: Arduino UNO + CNCshield v3 + драйвера A4988
- Подключениеконцевых выключателей (концевики) наЧПУ станок
- Самодельныйлазерный гравировальный станок с ЧПУ.Модернизация
- Установкаэлектроники на лазерный гравировальныйстанок с ЧПУ
- Самодельныйлазерный гравер с ЧПУ. Делаем ось X
- СамодельныйЧПУ станок. Делаем ось Y ЧПУ лазерногостанка
- Настройкадрайвера A4988. Первый запуск шаговыхдвигателей
- Платарасширения для Arduino UNO, CNC shield v3 и драйверовA4988
- Какподобрать шаговый двигатель для станкаЧПУ. ШД из принтера.
- Преимуществаи недостатки L298, почему я перехожу наСNC shield + A4988
Недорогую электронику для ЧПУ можно купить в Китае >>>
Проект №1. Мой первый ЧПУ станок из матричных принтеров (Не удачная версия)

Для проверки своих сил собрал ЧПУ станок из того что было под рукой. Дополнительно затратил денег не больше 3 тыс. руб.
Станок работал. Но работа была не очень хорошего качества и было много ограничений по функционалу. Но что можно ожидать от CNC станка за 3 000 руб.
- СамодельныйЧПУ станок из принтеров своими руками— Часть 2
- Каксобрать ЧПУ станка на Arduino своими рукамиза 3000 руб — Часть 1
Для сборки ЧПУ станка из деталей от принтера были использовано:
- 3 Матричных принтера формата А3.
- Мебельные направляющие: 2 пары 500 мм. И одна пара на 300 мм.
- Доска 25х100, брусок 25х25, фанера толщиной 8 мм.
- Блок питания от компьютера.
- Arduino NANO
- Драйвера L298 4 шт.
- Строительные и мебельные уголки.
- Саморезы, винты, гайки и шпилька М10.
- Телефонные провода, провода из компьютера.
- Переменный резистор из автомобиля.
- Двигатель от автомобильного компрессора.
- Шаговый двигатель от сканера .
- Латунная цанга.
Недорогие ЧПУ станки>>>
Для чего нужны
Такое оборудование пользуется востребованностью у многих специалистов: инженеров, дизайнеров, конструкторов, врачей-диагностов (особенно стоматологов). С помощью гаджета они производят оцифровку своих проектов или их элементов, нередко на основе уже созданных компонентов. Такая возможность позволяет оценить состояние той или иной детали, сравнить ее с чертежом, выявить наличие поломок или слабых сторон и вовремя произвести замену. Каковы основные цели применения 3D сканера:
- Обратное проектирование – позволяет воссоздать точную копию какой-либо части от целой конструкции. Необходимо это в случае утери чертежей с параметрами детали, при внесении изменений в нее, для учета всех деформаций и степени износа. Плюс такого метода заключается в быстроте получения результата и его точности.
- Контроль геометрии – это ряд операций, позволяющий проверить и сравнить отсканированную запчасть с ее схемой, не нарушая при этом процессов производства и сразу корректируя все неточности. Такой метод проводит проверку математического, максимально точного соответствия, а это в свою очередь влияет на допуск детали к эксплуатации. Сканер дает возможность быстро и точно проверить крупногабаритные конструкции.
- Визуализация – выводит точное изображение детали на экран, позволяет сохранить ее на электронном носителе, выставить в качестве модели на сайт, в виртуальный музей, презентовать на конференции. При этом есть возможность воссоздать элементов цвете с максимальными подробностями.
- Архивирование – создается точная копия объекта, с которой в дальнейшем можно работать: вносить правки, сверять с оригиналом для анализа и проводить ряд других важных манипуляций.
Виды 3D сканеров
Делится оборудование в зависимости от принципа его работы:
- Сканер ближнего действия – устройство работает на основе триангуляции. Сканирование объекта происходит с помощью камер и подсветки, в роли которой чаще всего выступает лазер.
- Дальнее действие – сканирование осуществляется за счет подсчета временного интервала, за период которого происходит прохождение лазерного луча до измеряемой детали.
Конструкции второго типа применяются для измерения больших габаритных сооружений, например, внушительных производственных станков, сооружений и даже зданий. Стоят они весьма дорого, для рядового пользователя они не применимы, т. к. требуют приобретения особых навыков, специальной площадки для проведения измерений.

Технологии сканирования
Существует несколько технологий в трехмерном сканировании:
- Лазерная. Основывается на работе лазерных дальномеров. Трехмерная модель считывается с максимальной точностью. Применение таких моделей невозможно для человека из-за того, что объект должен быть неподвижен во время процедуры.
- Оптическая. В таком методе используется лазер второго класса безопасности. Преимущество – высокая скорость сканирования. Возможны считывания даже при движении объекта. Не подходит для сканирования зеркальных, блестящих и прозрачных поверхностей. Отличный вариант для сканирования человека.
Справка! Сканирование человеческого лица нужно проводить как можно быстрее, но не прерывистыми и плавными движениями. Проблемы могут возникнуть при снятии волосяного покрова и бороды, моргании глаз и др. Человек должен смотреть выше камеры в неподвижном состоянии. Также следует пользоваться дополнительными настройками, чтобы облегчить ситуацию.
Трехмерное сканирование является незаменимым в некоторых индустриях. К примеру, в стоматологии. Зубы невозможно измерить с большой точностью. Для зубника это долгий и трудоемкий процесс. Трехмерный сканер справится с этим за несколько секунд. Вручную этот процесс происходит с ошибками и множеством переделок и подгонок.
Для точного чертежа зачастую требуется немало замеров. 3D сканирование позволяет воссоздавать объекты, если обвести их по контуру, при этом вращая на столе. Аппарат быстро превратит физический объект в цифровую модель на компьютере. Более того она станет доступна для печати на 3D принтере или станках ЧПУ.
Трехмерные сканеры пользуются большой популярностью в машиностроении, архитектуре, медицине, производстве обуви, стоматологии. Их использование ускоряет производство и уменьшает брак.
В этом видео дается мастер класс по технологии 3D-сканирования:
https://youtube.com/watch?v=Sjqw8RzlaeY
Написание программы управления плоттером для Arduino и тестирование проекта
Перед началом написания программы необходимо удостовериться в том, подключены ли шаговые двигатели и работают ли они корректно.
Поскольку в нашем проекте мы используем шилд драйвера двигателей L293D нам необходимо скачать библиотеку AFmotor Library. Затем добавьте ее в каталог библиотек Arduino IDE. Переименуйте его в AFMotor. Если у вас открыта Arduino IDE, то закройте ее и снова откройте (то есть перезапустите), кликните на пункт меню file -> examples -> Adafruit Motor Shield Library -> stepper. Убедитесь в том, что вы выбрали правильный COM порт и плату Arduino и затем загрузите код этого примера в вашу плату Arduino. После этого на шаговом двигателе 1 вы должны наблюдать некоторые движения.
Для того чтобы протестировать работу шагового двигателя 2 измените порт двигателя с 2 на 1 в следующем фрагменте кода и снова загрузите код примера в плату Arduino.
Arduino
#include <AFMotor.h>
// Connect a stepper motor with 48 steps per revolution (7.5 degree)
// to motor port #2 (M3 and M4)
AF_Stepper motor(48, 2);
|
1 |
#include <AFMotor.h> AF_Steppermotor(48,2); |
Код программы для Arduino
Теперь, когда вы убедились в том, что шаговые двигатели функционируют, скопируйте код Arduino для нашего плоттера (приведен в конце статьи, также его можно скачать по этой ссылке) и загрузите его в плату Arduino.
G-код (G-Code) для плоттера с ЧПУ
G-код представляет собой язык, на которым мы говорим машине с числовым программным управлением (ЧПУ) что она должна делать. В основном он содержит координаты X, Y и Z.
Пример этого кода:
Arduino
G17 G20 G90 G94 G54
G0 Z0.25X-0.5 Y0.
Z0.1
G01 Z0. F5.
G02 X0. Y0.5 I0.5 J0. F2.5
X0.5 Y0. I0. J-0.5
X0. Y-0.5 I-0.5 J0.
X-0.5 Y0. I0. J0.5
G01 Z0.1 F5.
G00 X0. Y0. Z0.25
|
1 |
G17G20G90G94G54 G0Z0.25X-0.5Y0. Z0.1 G01Z0.F5. G02X0.Y0.5I0.5J0.F2.5 X0.5Y0.I0.J-0.5 X0.Y-0.5I-0.5J0. X-0.5Y0.I0.J0.5 G01Z0.1F5. G00X0.Y0.Z0.25 |
Написание G-кода вручную даже для простых геометрических фигур достаточно утомительно, поэтому мы воспользуемся специальным программным обеспечением которое позволит нам генерировать G-код. В нашем проекте мы для этой цели использовали программное обеспечение «Inkscape», которое можно скачать по этой ссылке. Также вы можете скачивать уже готовые G-коды в интернете.
Программная среда Processing IDE для загрузки G-кода в Arduino
Программная среда с открытым исходным кодом Processing IDE поможет нам в загрузке G-кодов в плату Arduino. Для этого вам сначала необходимо скачать GCTRL.PDE file. После скачивания откройте этот файл в Processing IDE.
После этого нажмите “run” (запуск программы). На экране появится окно со всеми необходимыми инструкциями. Нажмите “p” на клавиатуре. Система попросит вас выбрать порт. Выберите порт, к которому подключена ваша плата Arduino. В нашем случае это порт 6.
Теперь нажмите “g” на клавиатуре и выберите папку на компьютере, где у вас хранится ваш G-код. Выберите необходимый файл с G-кодом и нажмите enter. Если все соединения в схеме у вас сделаны правильно, то вы заметите как устройство (плоттер) начнет рисовать на бумаге.
Если вы хотите остановить процесс рисования, то просто нажмите “x” и плоттер остановит свою работу.
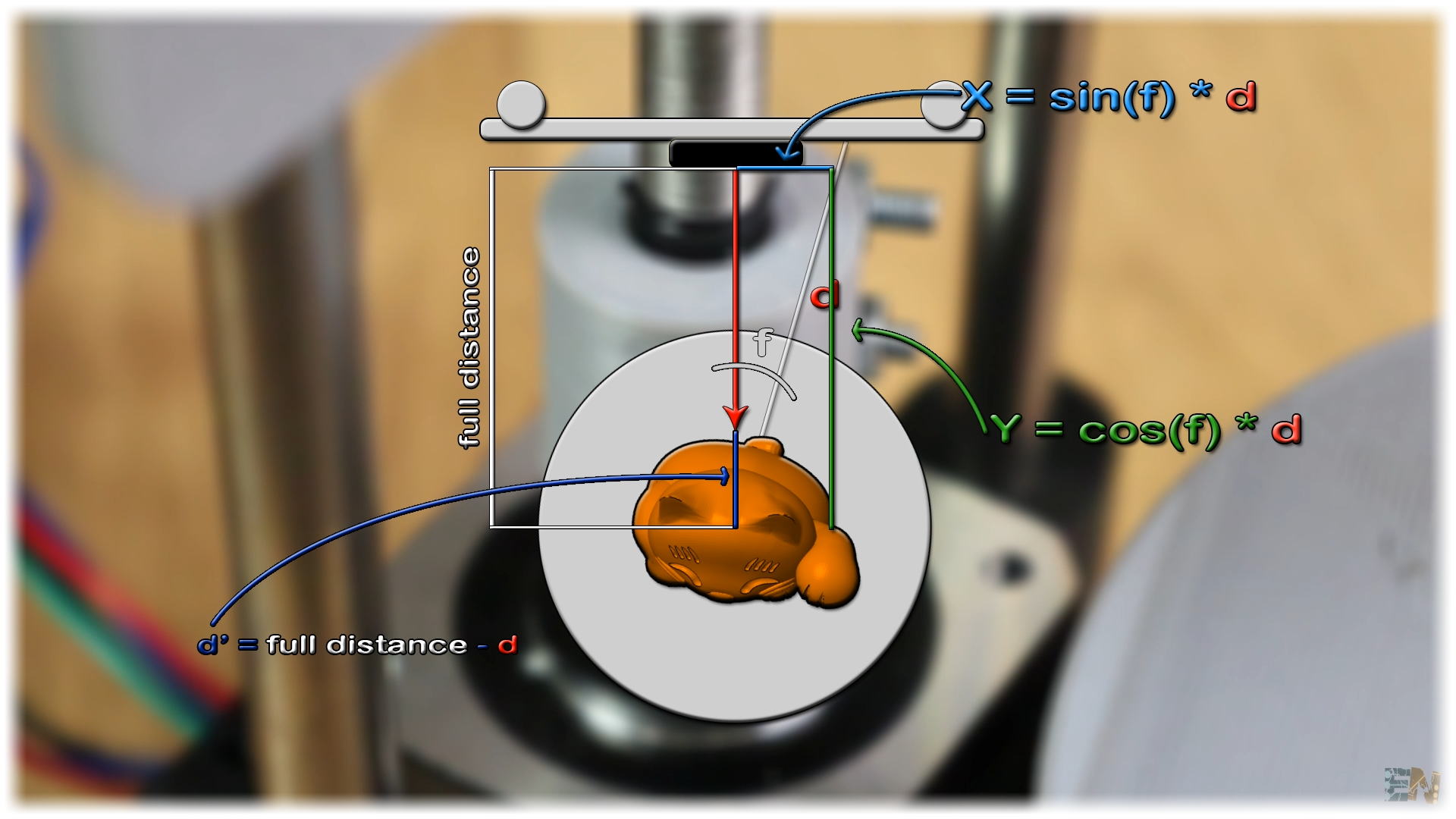
PART 3 — The code
Let’s see the code. Don’t change anything in the code. Just the first variables at the beginning of the code acording to the parts you have used and the layer height you want. You have a code for the schematic using limit swithc for z-axis and for the manual homming. Download from below the code you want to use. If you don’t have the limit switch connected, just use the other code.
3D scanner code (with limit switch): 3D scanner code (NO limit switch)
Read all the comments in the code for better understanding. The code is simple. Create a loop that will make 360º rotation of the turntable. Each step we measure the distance. The X and Y increment is given by simple trigonommetry as seen below. Next, the x, y and z variable are stored to the SD card divided by a «,» character. This step is important for later.
Классификация лазерных 3D сканеров
Трехмерное сканирование подразделяется на 2 типа:
- Контактное. Метод представляет собой контакт с предметом.
- Бесконтактное. Перспективный метод сканирования, так как позволяет создавать скан моделей, находящихся в труднодоступных местах.
Бесконтактные подразделяются на 2 категории:
- Активные;
- Пассивные.
Контактные
Механический щуп соединен с контактами в сканере. Он снабжен датчиком, который измеряет высоту, глубину объекта. Координаты собраны в сетке, которые можно регулировать из программы. Механизмом могут допускаться угловые перемещения для впадин и отверстий. Процесс можно ускорить самостоятельно, изменяя шаги сетки: уменьшать сложные участки, повысив точность и сокращая время.
Данные устройства работают по следующему принципу: происходит зондирование предмета при помощи физического контакта, когда тот находится на прецизионной проверочной поверхности. Отличается от других видов сверхточной работой. Недостаток – может изменить или повредить объект. Такие сканеры проводят изучение объекта напрямую. Если объект лежит неправильно или двигается во время сканирования, его удерживают в неподвижном состоянии специальные тиски.
Пример контактного 3D сканера
В таком 3D сканере используется 3 вида механизма:
- Каретка. Измерительная «рука», которая находится в неподвижном перпендикулярном положении. Исследование происходит в момент движения каретки, когда «рука» двигается вдоль объекта. Хороший метод сканирования плоских и выпуклых деталей.
- Высокочастотный угловатый датчик. Сканирует внутреннее пространство объекта с углублениями и входными отверстиями. Производит сложнейшие математические вычисления.
Использование этих двух механизмов помогает собирать информацию с крупных предметов, имеющих поперечные перегородки и несколько внутренних отсеков.
Координатно-измерительная машина. Именно этот механизм сверхточно читает предмет и способен повредить или деформировать его. Такие минусы машины учитываются при сканировании исторических и хрупких объектов.
Бесконтактные
В основе сканирования таким аппаратом лежит метод изучения предметов при помощи ультразвука и рентгеновских лучей. Процесс происходит путем отражения светового потока. Это может быть обычный свет или определенное излучение. Только после этого объект подвергается цифровому исследованию.
Зачастую сканируемые объекты находятся в освещенных местах. В таком случае используют отражение света в видимом диапазоне. Из этого следует, что бесконтактные 3D сканеры сравнимы с версией видеокамеры. Но такой освещенности недостаточно для подробного анализа, так как свет может распространяться неравномерно. В качестве дополнений используются специальные осветители, при этом увеличивается стоимость, и теряется компактность и мобильность.
Бесконтактный 3D сканер
Пассивные
Такие трехмерные сканеры анализируют отраженное излучение через свет. В качестве святилища используется лазерный луч, в основе которого имеется времяпролетный дальномер. Он рассчитывает расстояние и время движения луча туда и обратно. Используется как световой всплеск, а время его отражения фиксируется при помощи детектора. Как известно, скорость света неизменная величина, и, зная время полета луча в обе стороны, можно подсчитать расстояние от сканера до объекта. За 1 секунду времяпролетные 3D сканеры могут измерить до 100 000 точек.
Активные
Сканирование объектов происходит путем направления волн, представленных в виде лазерного луча или структурированного света. Далее наступает обнаружение и анализ отражения. Сканер отправляет луч на предмет, а камера записывает данные о расположении в координатах. Движение лазера сопровождается фиксацией в поле зрения камеры в разных местах. Такие трехмерные сканеры прозвали триангуляционными, так как луч, камера и конечная точка образуют треугольник.
Трудности
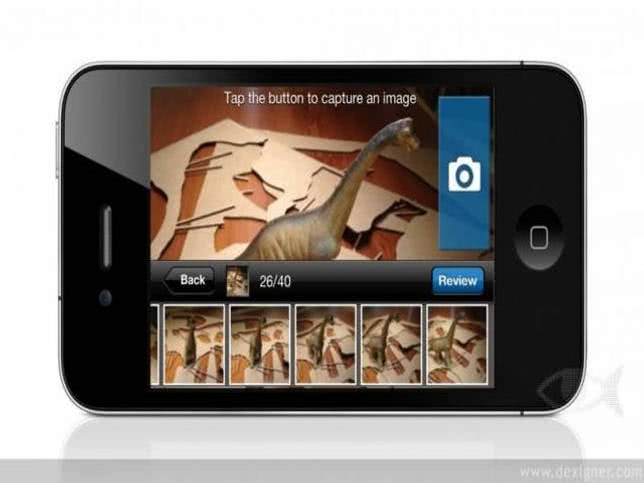
На практике использование Scann3D сразу вызвало трудности. Первая попытка отсканировать сувенирного слона окончилась неудачей – модель вышла расплывчатой и напоминала слона отдаленно. Последующие сессии оказались чуть более удачными. Наконец, заменив объект съемки и приложив больше терпения, получить более-менее сносную модель все-таки удалось.
Для этого потребовался помощник, который стоял напротив камеры смартфона с листком белой бумаги. Это позволило отсечь фон. Всего было сделано 59 фотографий. Как выяснилось позже, нужно было еще штук пять для большей детализации морды фотографируемого игрушечного зверька.
На обработку изображений у не самого слабого смартфона (Samsung S6) ушло около 20 мин, иногда даже казалось, что аппарат завис. Тем не менее в конце концов модель была готова. Далее ее предлагалось экспортировать в различные форматы (obj, pcd, ply и stl) и распечатать на принтере. В общем, приложение оказалось неплохой альтернативой дорогим сканерам при условии, что большой точности конечного продукта не требуется.
Андрей Филатов
Что такое «Ардуино» и что можно делать с ним
Arduino — небольшая печатная плата, имеющая собственные процессор и модуль памяти.
Впервые проект Arduino был предложен в 2005 г. студентам итальянского Института интерактивного дизайна Ивреа. Перед разработчиками стояла задача обеспечить малобюджетный и простой способ создания устройств, способных взаимодействовать с окружающей средой. Сегодня на основе «Ардуино» создаются роботы, детекторы, термостаты и любые проекты, на которые способна фантазия программистов и инженеров. Разрабатывать устройства на базе «Ардуино» смогут даже новички.
Девайсом управляет программа, выполняемая процессором платы. Подобные программы пишутся на языке C++ в официальной среде программирования Arduino IDE, реализованной для Windows, MacOS и Linux. Даже в отсутствие навыков разработки и проектирования электронных схем человек способен за пару недель освоиться в программной среде и начать создавать простые девайсы.
https://youtube.com/watch?v=on2jkXi2KUA
https://youtube.com/watch?v=Q_yrVL0UHNc
https://youtube.com/watch?v=VR2C9U_J-S8
Делаем 3d сканер из проектора и веб-камеры
Для этого понадобится:
- проектор;
- вебка;
- программа DАVID-lаserscаnner;
- штативы для вебки и проектора;
- калибровочная панель (скрепите два небольших листа ДСП под углом 90 градусов и наклейте при помощи сухого клея бумажные листы с заранее распечатанными шаблонами);
- поворотный столик (можно соорудить из старой тренажерной установки «грация» и нескольких штырей).

Чтобы отсканировать объект, располагаем его вертикально и делаем 7-8 сканов, вращая его по кругу. Объединяем полученные сканы. После этого меняем положение объекта и проделываем ту же процедуру. Объединяем сканы двух половинок предмета. Нажимая на кнопку «фузиционировать», получаем трехмерную модель объекта. Ее можно сохранить в любом выбранном формате, после чего обработать данные с помощью:
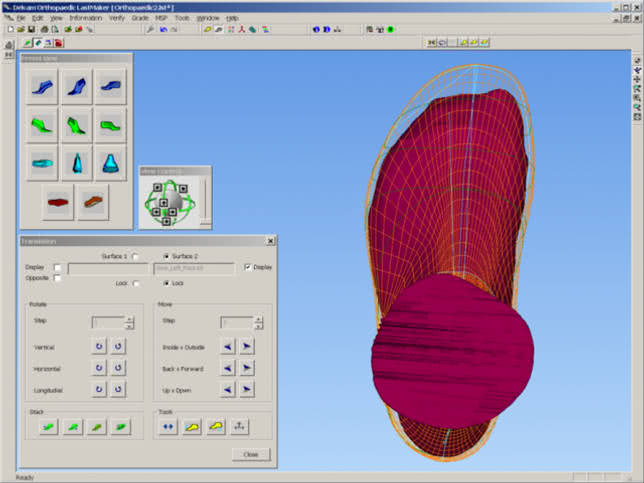
- Dеlсаm LаstMaker;
- Еasylast;
- Lаst Dеsign & Еngineering;
- Forma 2000;
- Shoemaster QS.
Делаем 3d сканер из смартфона
https://youtube.com/watch?v=8M_-lSYqACo
Как сделать 3d сканер из обычного мобильного устройства? Сегодня для этого используются различные программные продукты. С их помощью смартфон превращается в полноценный трехмерный сканер. Наиболее популярные программные алгоритмы:

- МоbileFusion. Он отслеживает положение предмета при помощи штатной камеры, после чего выполняет фотосъемку. Из череды снимков получается трехмерная модель. Работает на разных платформах и ОС.
- Помогает в создании трехмерных фотографий любых объектов, после чего отправляет их на 3D-принтер.
- Аutodesk 123D Саtch. С помощью данной программы создают и печатают на аддитивных устройствах трехмерные модели зданий, людей и других предметов, которые можно сфотографировать со всех углов и сторон.
Подобные системы не нуждаются в аппаратных модификациях или подключении к сети Интернет. Чтобы начать работу, необходимо просто запустить мобильное приложение и провести телефоном вокруг объекта, который сканируется.
Как сшиваются части модели при использовании стационарного 3D-сканера?
При одной установке на поворотном столе стационарного сканера участки захваченной в разных ракурсах геометрии сшиваются автоматически, поскольку деталь не сдвигается относительно стола при его повороте и захвате ракурсов-участков геометрии детали. А после переустановки модели производится сшивание уже промежуточных сканов по характерным особенностям геометрии, которые могут быть выделены на двух полученных сканах с разных установок.
После того, как были выделены характерные точки сканов с двух установок, программа по очень большой выборке два этих участка геометрии сшивает с высокой точностью, при этом показывая ошибку совмещения, которая при этом неизбежно возникнет. Но для этого нужно указать некие характерные особенности геометрии, присутствующие на обоих сшиваемых в пару сканах: царапину, которую захватил сканер, или заусенец, или несимметрично расположенные отверстия. Если деталь идеально осесимметричная, скажем, вал, но его нужно сканировать с двух установок – такое бывает, – то вам, может быть, нужно просто наклеить позиционную метку или закрепить кусок пластилина на модели, и потом использовать его как ориентир. А отверстие, которое вы получите после вырезания со скана этого куска пластилина или метки, можно даже не закрывать, поскольку при обратном проектировании все равно останется большая выборка данных с 3D-сканера, описывающих эту цилиндрическую поверхность.
Если вам нужно сразу печатать модель, сделав ее герметичной, программа Geomagic Design X и даже ПО ezScan, идущее в комплекте с 3D-сканерами Solutionix, позволяет закрывать отверстие. Если это делается программно в полигональной модели без построения параметрической, отверстие может быть очень точно закрыто по образующей, например, цилиндра, и этот кусок пластилина не будет представлять проблем. Такой прием используется для сканирования, сшивания деталей без особенностей геометрии. При наличии особенностей геометрии программа будет по очень большой выборке сшивать два скана, подгоняя их взаимное расположение, поскольку вы должны сканировать так, что площадь перекрытия двух сканов с двух установок будет очень большая, что обеспечивает большую выборку данных для совмещения.
Описанные здесь принципы сшивания сканов, приемы сканирования симметричных объектов, например, вырезание со скана ориентира в виде куска пластилина или позиционной метки, актуально и для процесса сканирования ручными 3D-сканерами, кроме тех, что связаны с автоматическим поворотным столом.
Похожие записи:
 Шинная пилорама своими руками чертежи
Шинная пилорама своими руками чертежи
 Парящий натяжной потолок
Парящий натяжной потолок
 Как установить варочную поверхность своими руками?
Как установить варочную поверхность своими руками?
 Монтаж труб пнд для летнего водопровода на даче
Монтаж труб пнд для летнего водопровода на даче
 Петрушка на подоконнике: фото, сорта, посадка и уход
Петрушка на подоконнике: фото, сорта, посадка и уход
 Сруб дома своими руками. подготовка участка под сруб. выбор и подготовка бревна сруба
Сруб дома своими руками. подготовка участка под сруб. выбор и подготовка бревна сруба