Строительство
L298 драйвер двигателя с двойным Н-мостом
Реле
Один из способов построить H-мост — использовать набор реле на релейной плате.
Реле « » (DPDT) обычно может обеспечивать те же электрические функции, что и H-мост (с учетом обычных функций устройства). Однако Н-мост на основе полупроводников будет предпочтительнее реле, где требуется меньший физический размер, высокая скорость переключения или низкое напряжение возбуждения (или низкая мощность возбуждения), или где износ механических частей нежелателен.
Другой вариант — иметь реле DPDT для установки направления тока и транзистор для включения тока. Это может продлить срок службы реле, поскольку реле будет переключаться, когда транзистор выключен, и, следовательно, ток не будет протекать. Он также позволяет использовать ШИМ-переключение для управления текущим уровнем.
Полупроводники с каналом N и P
Твердотельное Н-моста , как правило , построены с использованием противоположных устройств полярности, такие как PNP биполярных транзисторов (BJT) или Р-канальных МОП — транзисторов , подключенных к высоковольтной шиной и NPN BJTs или МОП — транзисторов N-канал , соединенный с шиной низкого напряжения.
Полупроводники только с N каналом
В наиболее эффективных конструкциях полевых МОП- транзисторов используются N-канальные полевые МОП-транзисторы как на стороне высокого, так и на стороне низкого уровня, поскольку они обычно имеют треть сопротивления включения МОП-транзисторов с P-каналом. Это требует более сложной конструкции, поскольку затворы полевых МОП-транзисторов верхнего плеча должны иметь положительный контакт по отношению к шине питания постоянного тока. Многие драйверы затвора на полевых МОП-транзисторах на интегральных схемах включают в себя накачку заряда для достижения этой цели.
В качестве альтернативы можно использовать преобразователь постоянного тока в постоянный импульсный источник питания для обеспечения изолированного («плавающего») питания схемы управления затвором. Обратный преобразователь с несколькими выходами хорошо подходит для этого применения.
Другой метод управления мостами MOSFET — это использование специализированного трансформатора, известного как GDT (трансформатор управления затвором), который дает изолированные выходы для управления затворами верхних полевых транзисторов. Сердечник трансформатора обычно представляет собой ферритовый тороид с соотношением обмоток 1: 1 или 4: 9. Однако этот метод можно использовать только с высокочастотными сигналами. Дизайн трансформатора также очень важен, так как индуктивность рассеяния должна быть минимизирована, иначе может возникнуть перекрестная проводимость. Выходы трансформатора обычно ограничиваются стабилитронами , поскольку выбросы высокого напряжения могут разрушить затворы полевого МОП-транзистора.
Варианты
Обычный вариант этой схемы использует только два транзистора на одной стороне нагрузки, аналогично усилителю класса AB . Такая конфигурация называется «полумостом». Он действует как электронный тумблер, полумост не может переключать полярность напряжения, подаваемого на нагрузку. Полумост используется в некоторых импульсных источниках питания, в которых используются синхронные выпрямители, и в импульсных усилителях . Тип полу-H-моста обычно сокращается до «Half-H», чтобы отличать его от полных («Full-H») H-мостов. Другой распространенный вариант, добавление третьей «ноги» к мосту, создает . Трехфазный инвертор — это основа любого привода переменного тока .
Еще одна разновидность — это полууправляемый мост, в котором коммутационное устройство на стороне низкого напряжения на одной стороне моста и переключающее устройство на стороне высокого напряжения на противоположной стороне моста заменено диодами. Это исключает режим сквозного отказа и обычно используется для управления машинами с переменным или переключаемым сопротивлением и исполнительными механизмами, где не требуется двунаправленный ток.
Коммерческая доступность
Существует множество коммерчески доступных недорогих корпусов с одинарным и двойным H-мостом, из которых серия L293x включает самые распространенные. Некоторые корпуса, такие как L9110, имеют встроенные обратноходовые диоды для защиты от обратного ЭДС.
Резонансный полумост
Довольно перспективный вид полумостового преобразователя, его схема показана ниже:
Резонансный полумост будет немного проще, чем полумост с ШИМ. Это обусловлено наличием индуктивности резонансной, которая ограничивает максимальный ток транзисторов, а коммутация транзисторов происходит в нуле тока или напряжения. Ток, протекающий по силовой цепи, будет иметь форму синусоиды, что снимет нагрузку с конденсаторных фильтров. При таком построении схемы необязательно необходимы драйверы, переключение может осуществляться обычным импульсным трансформатором. Качество управляющих импульсов в данной схеме не столь существенно как в предыдущей, но безтоковая пауза все равно должна быть.
В данном случае можно обойтись без токовой защиты, а форма вольт-амперной характеристики ВАХ будет иметь падающий вид, что не требует ее параметрического формирования.
Выходной ток будет ограничиваться только индуктивностью намагничивания трансформатора и соответственно сможет достигать довольно таки значительных величин, в случае, когда возникнет короткое замыкание КЗ. Данное свойство положительно влияет на поджиг и горение дуги, но и его также необходимо учитывать при подборе выходных диодов.
Как правило, выходные параметры регулируются изменением частоты. Но и регулирование фазное тоже дает немного своих плюсов и является более перспективным для сварочных инверторов. Он позволяет обойти такое неприятное явление как совпадение режима короткого замыкания с резонансом, а также увеличивает диапазон регулирования выходных параметров. Применение фазовой регулировки может позволить изменять выходной ток в диапазоне от 0 до Imax.
Схемы измерительных мостов
Измерительные мосты переменного тока делят на 2 группы: двойные и одинарные. Одинарные имеют 4 плеча. В них 3 ветви создают цепь с 4 точками подключения.
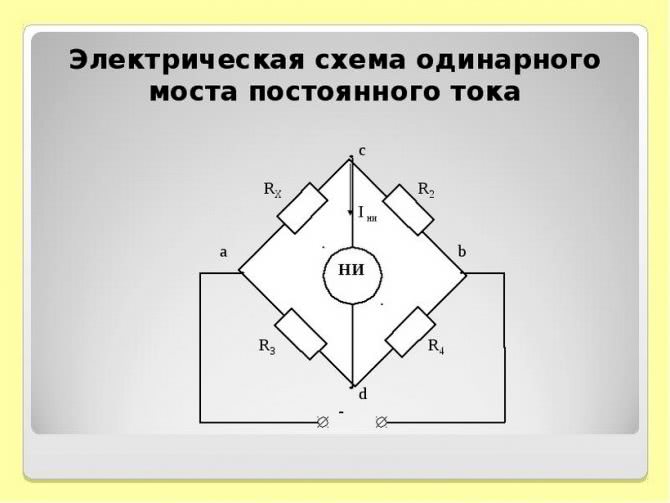
В диагонали моста есть электромагнитный гальванометр, показывающий равновесие. В другой диагонали моста действует источник постоянного питания. Измерения могут происходить с погрешностями, которые зависят от их диапазона. По мере роста сопротивления чувствительность прибора уменьшается.
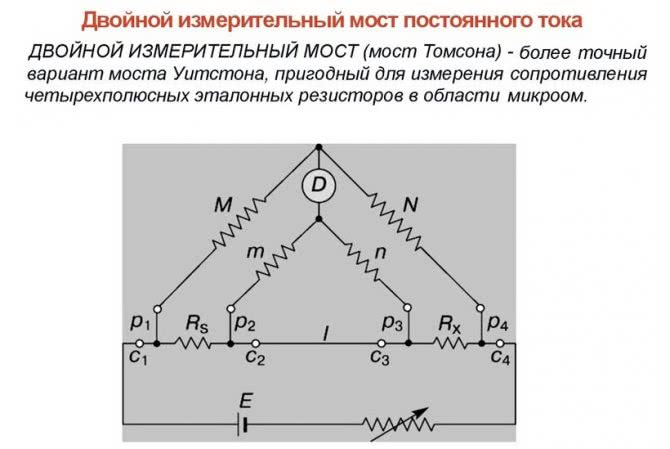
Двойной мост называют шестиплечим. Его плечи – измеряемое сопротивление (Rx), резистор (Ro) и 2 пары дополнительных резисторов (Rl, R2, R3, R4).
Операция
Два основных состояния H-моста
Н-образная перемычка обычно используется для изменения полярности / направления двигателя, но также может использоваться для «торможения» двигателя, когда двигатель внезапно останавливается из-за короткого замыкания клемм двигателя, или для того, чтобы позволить двигателю двигатель от холостого хода до остановки, так как двигатель фактически отключен от цепи. В следующей таблице приводится сводка операций, при этом S1-S4 соответствуют диаграмме выше.
| S1 | S2 | S3 | S4 | Результат |
|---|---|---|---|---|
| 1 | 1 | Мотор движется вправо | ||
| 1 | 1 | Мотор движется влево | ||
| Моторные берега | ||||
| 1 | ||||
| 1 | ||||
| 1 | ||||
| 1 | ||||
| 1 | 1 | Моторные тормоза | ||
| 1 | 1 | |||
| Икс | Икс | 1 | 1 | Короткое замыкание |
| 1 | 1 | Икс | Икс |
Резонансный мост
Является наиболее перспективной схемой высокочастотного преобразователя для сварочного инвертора, блок схема которого показана ниже:
Резонансный мост не сильно отличается от полного моста с ШИМ. Разница заключается в том, что при резонансном подключении последовательно с обмоткой трансформатора подключают резонансную LC цепочку. Однако ее появление в корне меняет процесс перекачки мощности. Уменьшатся потери, увеличится КПД, снизится нагрузка на входные электролиты и электромагнитные помехи уменьшатся. В данном случае драйверы на силовые транзисторы нужно применять только в случае если будут использованы MOSFET транзисторы, которые имеют емкость затвора более 5000 pF. IGBT могут обойтись лишь наличием импульсного трансформатора. Более подробные описания схем будут приводится в следующих статьях.
Управление выходным током может производится двумя способами – частотным и фазовым. Оба эти способы описывались в резонансном полумосте (смотри выше).
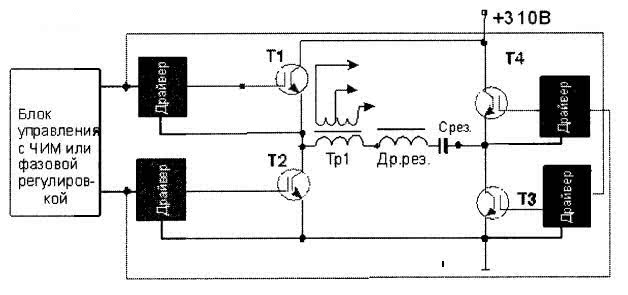
Полный мост с ШИМ
Представляет собой классический двухтактный преобразователь, блок схема которого показана ниже:
Данная схема позволяет получать мощность в 2 раза больше, чем при включении типа полумост и в 2 раза больше чем при включении типа «косой» мост, при этом величины токов и соответственно потери во всех трех случаях будут равны. Это можно объяснить тем, напряжение питания будет равным напряжению «раскачки» первичной обмотки трансформатора силового.
Для того, чтоб получить одинаковые мощности с полумостом (напряжение раскачки 0,5Uпит.) необходим ток в 2 раза! меньше чем для случая полумоста. В схеме полного моста с ШИМ транзисторы будут работать поочередно – Т1, Т3 включены, а Т2, Т4 выключены и соответственно наоборот при изменении полярности. Через трансформатор тока отслеживают и контролируют значения амплитудное тока протекающего через эту диагональ. Для его регулирования есть два наиболее часто применяемые способы:
- Оставить неизменным напряжение отсечки, а изменять только длину импульса управления;
- Проводить изменения уровня отсекающего напряжения по данным с трансформатора тока при этом оставляя неизменным длительность импульса управления;
Оба способа могут позволить проводить изменения выходного тока в довольно больших пределах. У полного моста с ШИМ недостатки и требования такие же, как и у полумоста с ШИМ. (Смотри выше).
Транзисторы и Н-мост
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току. Поэтому оптимальны полевые (MOSFET) транзисторы. Чаще всего их используют в контроллерах. Очень редко можно встретить комбинированный вариант транзисторов.
Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.
Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением (+ или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами. С отрицательным — нижними. Для каждого шага открывается пара ключей: верхний одной фазы и нижний соседней фазы. В результате ток проходит от одной фазы к другой и приводит электродвигатель в движение.
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание
Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
WiFi точки доступа и другое оборудование
Рассмотрим некоторые из них по дальности действия. Если вы планируете создать wifi мост на расстояние не более 3 км в прямой видимости, то подойдут модели Ubiquiti NanoStation Loco M2, NanoStation Loco M5, NanoStation M2 — по возрастанию дальности их действия.

Следующие WiFi точки доступа уже бьют до 10 км — Ubiquiti NanoStation M5, NanoBridge M5 22dBi, NanoBridge M5 25dBi. Последние 2 с более усиленными антеннами.
Дистанцию в 20 км помогут преодолеть модели PowerBridge M3 и PowerBridge M5 со встроенными мощными узконаправленными антеннами.
И наконец, максимальное расстояние до 30-50 км вы покроете при помощи моделей Ubiquiti Rocket M2, Rocket M5, Rocket M5 GPS (с синхронизацией координат). Также для более стабильного приема их можно еще больше усилить антеннами — так, для точки Rocket M2, работающей на частоте 2.4 ГГц, идеально подходит RocketDish 2G-24, для Rocket M3 — Rocket Dish 3G, а для Rocket M5 — RocketDish 5G-30.

Если прямой видимости нет, то на расстояние до 5 км вам поможет модель NanoStation Loco M900. В отличие от большинства точек доступа, работающих на частоте 2.5 ГГц, в этом оборудовании частотный диапазон 900МГц, что помогает радиоволнам лучше огибать препятствия.
Кроме самих точек при уличной установке понадобятся еще некоторые устройства — это так называемая Грозозащита, которая защищает устройства, работающие по технологии PoE (то есть получающие питание через сетевой кабель) от опасных напряжений, которые могут возникнуть из-за атмосферных явлений.

Приведу характеристики серий точек доступа с сайта Ubiquity:
Примеры работы для Arduino и XOD
В качестве мозга для управления моторами рассмотрим платформу из серии Arduino, например Arduino Uno.
-
Как начать работу с Arduino?
-
Как начать работу с XOD?
Подключение к Arduino
Выберите один из вариантов коммуникации драйвера с внешним микроконтроллером:
- Подключите H-мост к платформе Arduino. Для коммуникации понадобятся соединительные провода «мама-папа».
- Для быстрой сборки и отладки устройства возьмите плату расширения Troyka Shield, которая одевается сверху на Arduino Uno методом бутерброда. Для коммуникации используйте трёхпроводные шлейфы «мама-мама», который идут в комплекте с модулем.
Управление коллекторными моторами
Код для Arduino
Для начала покрутим каждый мотор в одну, а затем другую сторону.
Прошейте платформу Arduino скетчем, приведённым ниже.
- troyka-h-bridge-dual-example-arduino-dc-motors.ino
-
// Пины управления скоростью и направлением мотора constexpr auto pinM1Speed = 9; constexpr auto pinM1Direction = A1; constexpr auto pinM2Speed = 10; constexpr auto pinM2Direction = A0; int pins = {pinM1Speed, pinM1Direction, pinM2Speed, pinM2Direction}; void setup() { // Настраиваем все пины управление моторами в режим выхода for (int i = ; i < 4; i++) { pinMode(pinsi, OUTPUT); } } void loop() { // Крутим мотор M1 в одну сторону в течении 1 секунды motorsDrive(255, ); delay(1000); // Крутим мотор M1 в другую сторону в течении 1 секунды motorsDrive(-255, ); delay(1000); // Крутим мотор M2 в одну сторону в течении 1 секунды motorsDrive(, 255); delay(1000); // Крутим мотор M2 в другую сторону в течении 1 секунды motorsDrive(, -255); delay(1000); // Стоим на месте motorsDrive(, ); delay(1000); } // Функция управления моторами void motorsDrive(int M1Speed, int M2Speed) { if (M1Speed > ) { digitalWrite(pinM1Direction, HIGH); } else { digitalWrite(pinM1Direction, LOW); } if (M2Speed > ) { digitalWrite(pinM2Direction, HIGH); } else { digitalWrite(pinM2Direction, LOW); } analogWrite(pinM1Speed, abs(M1Speed)); analogWrite(pinM2Speed, abs(M2Speed)); }
Усовершенствуем эксперимент: заставим каждый мотор по очереди плавно разгоняться и останавливаться в разных направлениях.
- troyka-h-bridge-dual-example-arduino-dc-motors-pwm.ino
-
// Пины управления скоростью и направлением мотора constexpr auto pinM1Speed = 9; constexpr auto pinM1Direction = A1; constexpr auto pinM2Speed = 10; constexpr auto pinM2Direction = A0; int pins = {pinM1Speed, pinM1Direction, pinM2Speed, pinM2Direction}; void setup() { // Настраиваем все пины управление моторами в режим выхода for (int i = ; i < 4; i++) { pinMode(pinsi, OUTPUT); } } void loop() { // Медленно разгоняем M1 в одну сторону for (int i = ; i <= 255; i++) { motorsDrive(i, ); delay(10); } // Медленно тормозим мотор for (int i = 255; i >= ; i--) { motorsDrive(i, ); delay(10); } // Медленно разгоняем M1 в другую сторону for (int i = ; i <= 255; i++) { motorsDrive(-i, ); delay(10); } // Медленно тормозим мотор for (int i = 255; i >= ; i--) { motorsDrive(-i, ); delay(10); } // медленно разгоняем M2 в одну сторону for (int i = ; i <= 255; i++) { motorsDrive(, i); delay(10); } // медленно тормозим мотор for (int i = 255; i >= ; i--) { motorsDrive(, i); delay(10); } // медленно разгоняем M2 в другую сторону for (int i = ; i <= 255; i++) { motorsDrive(, -i); delay(10); } // медленно тормозим мотор for (int i = 255; i >= ; i--) { motorsDrive(, -i); delay(10); } } // Функция управления моторами void motorsDrive(int M1Speed, int M2Speed) { if (M1Speed > ) { digitalWrite(pinM1Direction, HIGH); } else { digitalWrite(pinM1Direction, LOW); } if (M2Speed > ) { digitalWrite(pinM2Direction, HIGH); } else { digitalWrite(pinM2Direction, LOW); } analogWrite(pinM1Speed, abs(M1Speed)); analogWrite(pinM2Speed, abs(M2Speed)); }
Код для Arduino
- troyka-h-bridge-dual-example-arduino-stepper.ino
-
// Библиотека для работы с шаговым двигателем #include <AmperkaStepper.h> // Создаём объект для работы с шаговым двигателем // и передаём фиксированное количество шагов за полный оборот. // Подробности в характеристиках двигателя AmperkaStepper motor(200, A0, A1, 9, 10); void setup() { // Устанавливаем скорость вращения 30 оборотов в минуту. motor.setSpeed(30); } void loop() { // 180° по часовой стрелке в двухфазном режиме motor.step(100, FULL_STEP); delay(1000); // 180° против часовой стрелки в однофазном режиме motor.step(-100, WAVE_DRIVE); delay(1000); // 180° по часовой стрелке в полушаговом режиме motor.step(200, HALF_STEP); delay(1000); // 180° против часовой стрелки в двухфазном режиме // этот режим используется по умолчанию, если не передан // второй аргумент motor.step(-100); delay(1000); }
Защитный диод для индуктивной нагрузки
Каждый двигатель содержит проволочную обмотку (катушку) и, следовательно, в процессе управления двигателем на его выводах возникает всплеск ЭДС самоиндукции, которая может повредить транзисторы моста.
Чтобы решить эту проблему, вы можете использовать быстрые диоды типа Shottky или, если наши двигатели не являются особо мощными, просто обычные выпрямительные диоды, например 1N4007. Нужно иметь в виду, что выходы моста в процессе управления двигателем меняют свою полярность, поэтому необходимо использовать четыре диода вместо одного.
https://www.inventable.eu
Цифровой мультиметр AN8009
Большой ЖК-дисплей с подсветкой, 9999 отсчетов, измерение TrueRMS…
Подробнее
Режимы «bridge» и «router» — в чем между ними разница
Что такое «бридж» понятно — это опция, которая делает маршрутизатор посредником. В таком режиме он не может выполнять функцию точки доступа, то есть будет принимать пакеты и отправлять их дальше.
Если включена опция «router», то сетевое устройство берет полный контроль над трафиком, который через него проходит. Данная функция активна по умолчанию. Маршрутизатор, работающий в этом режиме, по сути — компьютер, который получает, преобразует и передает информацию. Он автоматически выбирает, кому передавать данные, а кого блокировать (в случае несанкционированного доступа). То есть это режим, используемый для раздачи Интернета на «домашние» устройства.
Есть в сетевом оборудовании еще один режим под названием «репитер», и не стоит его путать с «мостом». Многие неопытные пользователи считают, что если подключить один роутер к другому, то второй становится «репитером». Это не так, ведь второй девайс создает независимую самостоятельную сеть со своим паролем. Репитеру подобный функционал недоступен.
Аспекты проблем при управлении двигателем ПТ

Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
- обязательным присутствием гальванической развязки;
- плавным управлением мощностными показателями;
- отсутствием старт-стопного типа управления;
- контролированием перехода Zеrо — Сrоss;
- некоторыми особенностями подбора RC-фильтра snubbеr сглаживающего типа.
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии
Управление при помощи MOSFET транзистора
МОSFЕТ (mеtаl-охidе-sеmiсоnduсtоr fiеld еffесt trаnsistоr) — полевые полупроводниковые триоды или метал-окисел-полупроводники p-канального типа открываются на затворе отрицательным напряжением по отношению к источнику. Диод паразитного типа в канальной структуре анода подсоединяется к части стока, а катод соединяется с истоком.
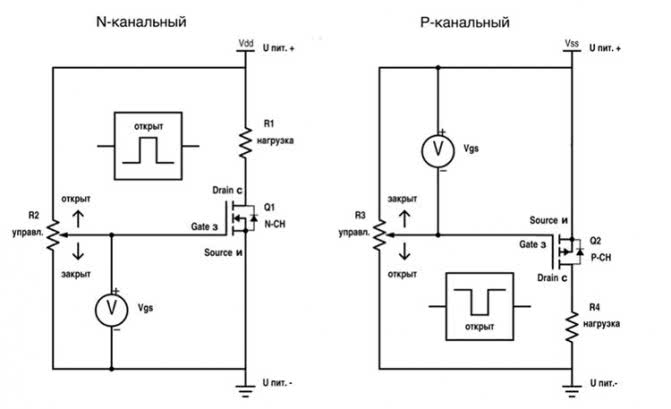
Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Управление при помощи реле
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:
- NО (Nоrmаlly ореn) — нормально-разомкнутого типа;
- СОМ (Соmmоn) — общего типа;
- NС (Nоrmаlly сlоsеd) — нормально-замкнутого типа.
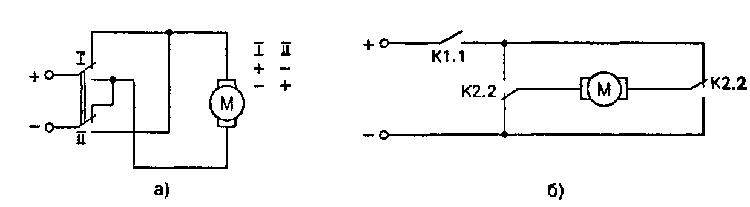
Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ). «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
При помощи H-моста
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:
- транзисторным H-мостом, простым в изготовлении и достаточно мощным. К недостаткам можно отнести риск короткого замыкания при подаче на два входа;
- двойным H-мостом, собранным на маломощной микросхеме. Минусы данного варианта представлены слишком малой мощностью и необходимостью подключения вывода Е на питании к «плюсу»;
- одиночным Н-мостом, собранным на микросхеме, что обеспечивает подачу единички на два входа и может стать причиной торможения работы двигателя.
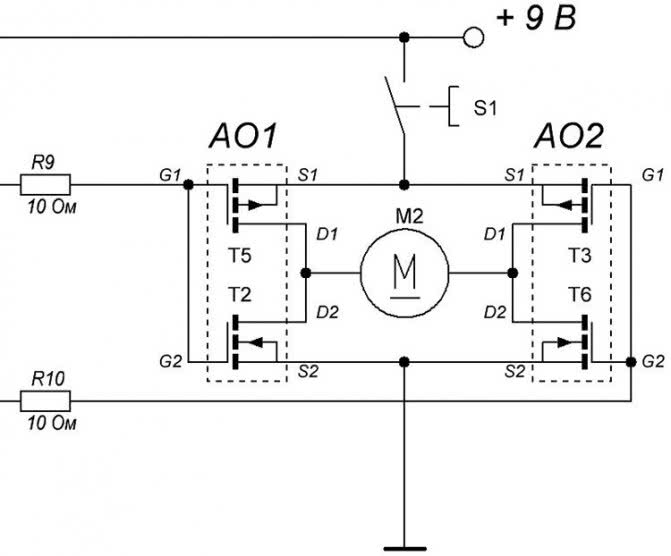
Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Элементы платы
Драйвер двигателей TB6612FNG
Сердце и мускулы платы — микросхема двухканального H-моста TB6612FNG, которая позволяет управлять двумя коллекторными моторами или одним биполярным шаговым двигателем с помощью внешнего микроконтроллера.
Термин «H-мост» появился благодаря графическому изображению схемы, напоминающему букву «H». Рассмотрим подробнее принцип работы H-моста.
В зависимости от текущего состояние переключателей возможно разное состояние мотора.
| S1 | S2 | S3 | S4 | Результат |
|---|---|---|---|---|
| 1 | 1 | Мотор крутится вправо | ||
| 1 | 1 | Мотор крутится влево | ||
| Свободное вращение мотора | ||||
| 1 | 1 | Мотор тормозит | ||
| 1 | 1 | Мотор тормозит | ||
| 1 | 1 | Короткое замыкание источника питания | ||
| 1 | 1 | Короткое замыкание источника питания |
Ключи меняем на MOSFET-транзисторы, а для плавной регулировки скорости вращения вала мотора используем ШИМ-сигнал.
Питание
На плате драйвера моторов присутствует два контура питания: силовое и логическое.
- Силовой контур (VM) — напряжение для питания моторов от силовой части микросхемы и светодиодов индикации. Силовое питание подключается через клеммник c входным диапазоном напряжения от 5 до 12 вольт.
- Логический контур (Vcc) — питание вспомогательной цифровой логики управления микросхемы . Логическое питание поступает на плату модуля через контакт . Диапазон входного напряжения от 3,3 до 5 вольт.
Если отсутствует хотя бы один из контуров питания — драйвер H-мост работать не будет.
При подключении питания соблюдайте полярность. Неправильное подключение может привести к непредсказуемому поведению или выходу из строя платы или источника питания.
Нагрузка
Нагрузка разделена на два независимых канала. Первый канал на плате обозначен шёлком , а второй канал — . К каждому каналу можно подключить по одному коллекторному мотору или объединить каналы для подключения биполярного шагового двигателя.
Обозначения «+» и «−» показывают воображаемые начало и конец обмотки. Если подключить два коллекторных двигателя, чтобы их одноимённые контакты щёточного узла соответствовали одному и тому же обозначению на плате, то при подаче на H-Bridge одинаковых управляющих импульсов, моторы будут вращаться в одну и ту же сторону.
Светодиодная индикация
| Имя светодиода | Назначение |
|---|---|
| DIR1/EN1 | Индикация состояния направления и скорости первого канала . При высоком логическом уровне светится зелёным светом, при низком — красным. Яркость светодиода пропорциональна скорости вращения двигателя. |
| DIR2/EN2 | Индикация состояния направления и скорости первого канала . При высоком логическом уровне светится зелёным светом, при низком — красным. Яркость светодиода пропорциональна скорости вращения двигателя. |
Мостовые схемы постоянного тока
На фото — диодный мост KBPC, рассчитанный на прямой ток 25 ампер.
Принципиальная схема мостика Уитстона Обратите внимание на основы электричества и на приборы электроники. Участки цепи, соединяющие точки а и с, а также b и d, называются диагоналями моста
Мостовые схемы включения резисторов Пример использования мостовой схемы соединения резисторов Мостовую схему применяют также для включения реле боксования на некоторых электровозах.
Мостовые схемы обладают высокой точностью, широким диапазоном измеряемых значений параметров элементов. Схема реверсирования. Сама сборка моста состоит из четырех диодов с одинаковыми параметрами.
Rx — неизвестное сопротивление R1, R2, R3 — регулируются до тех пор пока ток через ноль-индикатор не станет равным нулю. ИС A1 управляет транзистором Q1, который удерживает напряжение в средней точке моста равным нулю во всем диапазоне рабочих режимов. Схема управления электроприводом дистанционным способом. Схема диодного моста на 12 вольт позволяет эффективно выполнять функцию по выпрямлению переменного тока.
У такой сборки 4 вывода. На его плате легко обнаружить либо выпрямительный мост из отдельных мощных диодов, либо одну диодную сборку. По роду тока мостовые электрические схемы делятся на мосты постоянного и мосты переменного тока. Отсюда следует, что равновесие не зависит от сопротивления ноль-индикатора, так как ток не течет через него, а также от напряжения и сопротивления источника питания.
Поэтому, в схеме присутствуют специальные фильтры, представляющие собой электролитические конденсаторы с большой емкостью. Таким образом, если на вход диодного моста подать переменный ток электросети частота 50 герц , то на выходе получим постоянный ток с пульсациями частотой герц. Следовательно, емкостные и индуктивные компоненты следует размещать в противоположных плечах моста.
Набор декад с различными сопротивлениями, отличающимися друг от друга в 10, , и т. Сама сборка моста состоит из четырех диодов с одинаковыми параметрами. К узловым точкам С и D подключен источник питания с напряжением U.
При измерении, R1 и R2 выбираются такими, чтобы чувствительность моста была максимальной. Она обладает несколько большим дрейфом напряжения сдвига и более низким уровнем шумов. Таким образом, на печатную плату устанавливается сразу одна монолитная деталь. Его усложнение по сравнению с базовой схемой моста Уитстона является необходимым для избежания ошибок, вносимых паразитными сопротивлениями на пути тока между низкоомным образцовым сопротивлением и сопротивлением, величина которого измеряется. Где применяется схема диодного моста? Мостовой кран.Мост и тележка.часть 2.
Похожие записи:
 Как своими руками правильно сделать перегородку из гипсокартона с дверью или нишами, купе в стене или стену с проемом
Как своими руками правильно сделать перегородку из гипсокартона с дверью или нишами, купе в стене или стену с проемом
 Габаритные размеры плит пеноплекса в зависимости от его марки
Габаритные размеры плит пеноплекса в зависимости от его марки
 Линолеум для пола: описание видов и правила укладки
Линолеум для пола: описание видов и правила укладки
 Сечка для рубки
Сечка для рубки
 Как заменить масло в двигателе без ямы
Как заменить масло в двигателе без ямы
 Схема светодиодной лампы: устройство простейших драйверов
Схема светодиодной лампы: устройство простейших драйверов