А программировать надо уметь?
Если вы знаете, как это сделать, создание вашего первого робота может оказаться слишком простым. Если вы не знаете, как это сделать, это отличный повод научиться. Дело в том, что программирование робота — вещь очень интуитивная: вы написали код, и тут же загорелся свет. Вам нужно, чтобы ваш робот поворачивался, когда от стены остается менее 5 см, а значит, в программе нужно прописать такое условие, все логично. Поэтому дети часто начинают обучать программированию на примере робототехники: здесь вместо скучных абстракций они сразу получают ощутимый результат в реальном мире. Этот принцип лежит в основе обучения по программе «Робототехника». Все участники могут сразу применить полученные знания на практике.

Перед первой попыткой написать программу для робота достаточно понять, что такое цикл и условный оператор. Для тех, кому это слишком сложно, производители сборщиков часто предоставляют визуальные редакторы — вам вообще не нужно писать код, все настраивается путем перетаскивания блоков мышью. Конечно, никакую сложную функциональность таким способом запрограммировать нельзя, но это уже начало. Позже, если вы захотите углубить робототехнику, будет полезно освоить язык C, наиболее используемый в этой области.
Робот из фетра
Помимо обычного материала в виде картона, металла или пластика, поделка роботы для детей можно также сделать из фетра. Такая поделка подойдёт для игры маленьким девочкам.
Для создания флисового робота в стиле амигуруми вырезаем из ткани части по размерам:
- 4,5 см для туловища;
- 3,5 см для головы;
- 2,0 см для ног;
- 1,5 см для рук.
Для любой из частей туловища требуется по 6 квадратов флисовой ткани. По необходимости величину заготовок можно повысить для увеличения размера мягкой игрушки.

Делаем выкройки без припусков. Сшиваем части со всех сторон, применяя сметочный шов. В итоге должен выйти кубик. Перед прошиванием последней из сторон, заполняем кубик любым наполнителем.
Внимательно отслеживаем, чтобы из кубика не торчало лишних волокон. Если они есть, их можно обрезать ножницами. При выполнении работы, требуется делать все аккуратно.
Подобным образом сшиваем остальные части туловища робота, после закрепляем между собой клеем. На месте глаз пришиваем бусинки.

Мобильный механизм собственного изготовления
Даже без специализированных, и обычно дорогостоящих, наборов, вполне возможно сделать механический манипулятор подручными средствами. Итак, загоревшись замыслом создания робота, следует внимательно проанализировать запасы домашних закромов на предмет наличия невостребованных запчастей, которые могут быть использованы в этой творческой затее. В ход пойдут:
- моторчик (например, от старой игрушки);
- колёса от игрушечных автомобилей;
- детали конструкторов;
- картонные коробки;
- стержни авторучек;
- скотч разных видов;
- клей;
- пуговицы, бусинки;
- винтики, гайки, скрепки;
- всевозможные провода;
- лампочки;
- батарейка (подходящая моторчику по напряжению).
С помощью этих общедоступных составляющих можно сотворить настоящее техническое чудо.
Итак, для того чтобы сделать собственного робота из доступных в домашних условиях материалов, следует:
- подготовить найденные детали для механизма, проверить их работоспособность;
- нарисовать макет будущего робота, учитывая наличное оборудование;
- сложить корпус для робота из конструктора или картонных деталей;
- приклеить или спаять запчасти, отвечающие за движение механизма (например, скрепить моторчик робота с колёсной базой);
- обеспечить электропитание мотора, присоединив его проводником к соответствующим контактам батарейки;
- дополнить тематический декор прибора.
Сделать механизм такого робота можно за несколько часов, после чего остаётся придумать роботу имя и представить восхищенным зрителям. Наверняка некоторые из них подхватят новаторскую задумку и смогут смастерить собственных механических персонажей.
Есть ли смысл платить больше?
Топовые модели пылесосов умеют гораздо больше, чем их младшие братья. И речь идет не о каких-то бесполезных фичах. Например, более дорогие модели сами выпутываются из проводов, ориентируются в пространстве и анализируют ошибки. У них также есть дополнительные датчики, которые помогут избежать падения, если в помещении есть лестницы. Всё это умеют флагманы от ECOVACS, например DEEBOT OZMO T8 AIVI. Он не только ловко перемещается по квартире, но и очищает стойкие загрязнения с помощью встроенного вибробака. А DEEBOT T9 оснащен освежителем воздуха, чтобы удалять неприятные запахи. Кроме того, всеми премиальными моделями можно управлять через приложение — вы можете заранее запустить уборку, когда возвращаетесь из путешествия, или просто проехать по своей квартире и с помощью видеокамеры проверить, всё ли в порядке.
Медицинские роботы
Первоначально они использовались как вспомогательные устройства для сложных операций, но сейчас некоторые модели могут лечить пациентов сами, при частичном контроле докторов.
Хирург Da Vinci
Это модуль с четырьмя руками, у каждой из которых есть хирургический инструмент или камера. Вес машины – 500 кг. Любая операция Da Vinci исключает появление шрамов у больного, благодаря ювелирной точности. Несколько десятков моделей уже работают в России.
Японский фармацевт HOSPI
Эта машина – автоматизированная аптечка. Она нужна для выполнения простых функций санитарки. Речь идёт о поиске и подаче лекарств.
HOSPI, разработанный компанией Panasonic, запоминает, у какого пациента какой рецепт, забирает товары на складе и возвращается на сестринский пост. Он работает без подзарядки до 7 часов, передвигается со скоростью 1 м/с и перевозит до 20 кг.
HAL – роботизированный экзоскелет для нижней части туловища или всего тела

Костюм сделан для парализованных людей или больных, имеющих проблемы с передвижением. Он помогает быстрее восстановиться после травм или серьёзных операций. Сенсоры экзоскелета крепятся на кожу, чтобы перехватывать мозговые импульсы для мышц. А приводы на коленях, талии, плечах, локтях выполняют движения.
Робот из «Лего»
«Лего» — серия игрушек для детей, которая состоит в основном из деталей конструктора, соединяющихся в один элемент. Детали можно комбинировать, при этом создавая все новые и новые предметы для игр.
Собирать подобный конструктор любят практически все дети от 3 до 10 лет. В особенности детский интерес увеличивается, если из деталей можно собрать робота. Итак, чтобы собрать двигающиегося робота из «Лего», необходимо приготовить детали, а также миниатюрный мотор и блок управления.
К тому же сейчас продаются готовые наборы с деталями, позволяющие собрать самостоятельно любого робота. Главное — освоить приложенную инструкцию. К примеру:
- готовим детали, как указано в инструкции;
- прикручиваем колеса, если они есть;
- собираем крепления, которые будут служить поддержкой для моторчика;
- вставляем в специальный блок батарейку или даже несколько;
- устанавливаем двигатель;
- подключаем его к мотору;
- загружаем в память конструкции специальную программу, которая позволяет управлять игрушкой.
Как создать робота?
Когда речь заходит о роботах, мы представляем себе гигантскую машину с искусственным интеллектом, как в фильмах про Робокопа и т. д. Однако робот не обязательно должен быть большим и технически сложно сделанным устройством. В этой статье мы расскажем, как создать робота в домашних условиях. Сотворив собственного мини-робота, вы убедитесь, что никаких специальных знаний и инструментов для этого не потребуется.
Бытовые роботы
Одним из первых примеров удачной массовой промышленной реализации бытовых роботов стала механическая собачка AIBO корпорации Sony.

Робот-пылесос iRobot
В сентябре 2005 в свободную продажу впервые поступили первые человекообразные роботы «Вакамару» производства фирмы Mitsubishi. Робот стоимостью $15 тыс. способен узнавать лица, понимать некоторые фразы, давать справки, выполнять некоторые секретарские функции, следить за помещением.
Всё большую популярность набирают роботы-уборщики (по своей сути — автоматические пылесосы), способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
Послесловие
Несмотря на то, что есть гораздо более сложные и точные (в том числе дорогие) проекты, данный проект очень интересен и имеет отличный потенциал для практического применения. Такие конструкции нельзя использовать в непосредственном контакте с человеком из-за недостаточной точности самой концепции. А вот промышленность, медицина и т.д. Для задач без повышенных требований к точности движений в суставах наша роботизированная рука вполне подойдет. Ну а с точки зрения дальнейшей «апгрейда» руки тут поле вообще не вспахивается. Начиная с беспроводного управления, заканчивая заменой приводов, габаритов, развитием дополнительных степеней свободы.
Вот почему я люблю Arduino: вы можете очень быстро и за небольшие деньги собрать макет или прототип устройства, которое не только легко программировать, но и может выполнять действительно интересные задачи.
4 важных вопроса перед разработкой
Но перед этим попытайтесь ответить себе на следующие вопросы:
- В чем состоит ваша торговая идея?
- Какие задачи будет решать советник, и какое объективное преимущество это может дать в торговле?
- Возможно, вам нужен графический индикатор или вспомогательный скрипт?
- Насколько идея реализуема технически, и можете ли вы самостоятельно оценить ее сложность?
Это очень важные вопросы, которые не только помогут сэкономить немало времени, но и немного приблизят вас к пониманию собственной идеи. Наверняка, вы не пришли на рынок раздавать деньги нуждающимся, а имеете другие цели.
[info_block align=»right» linkText=»Форекс советники» linkUrl=»https://fortrader.org/forex-ea-testing/» imageUrl=»http://files.fortrader.org/uploads/2016/08/robot.jpg»]Исследование торговых роботов с возможностью скачать советника.
В идеале, вы должны досконально знать и понимать то, как функционирует выбранная вами торговая площадка и стратегия, на которой, собственно, вы будете зарабатывать. Любое расплывчатое определение или опускание неважных, на первый взгляд, моментов плохо обернется на следующих этапах разработки, и больно ударит по торговому счету. Не бойтесь воскрешать давно забытые торговые идеи, но и не старайтесь сыграть на одних готовых решениях. Рынок очень изменчив и по определению находится в постоянном движении, а конкуренция непрерывно ужесточается.
Телевизор из картонных коробок

Когда у детей есть личные вещи, такие как у взрослых, они себя чувствуют важными. Не обязательно тратить приличную сумму и покупать ребёнку собственный телевизор. Просто сделайте его своими руками и раскрасьте в яркие красивые цвета, которые так любят детки. При вручении подарка ребёнку скажите, что этот телевизор красивее, лучше и совершенно безвредный. Ваш ребёночек, несомненно, обрадуется такому подарочку.
Рекомендую к просмотру видео мастер-класс!
https://youtube.com/watch?v=anAHWKEAdHI
https://youtube.com/watch?v=NIjXD_0zmqk
https://youtube.com/watch?v=y7oUWqoKXVc
https://youtube.com/watch?v=55U21IJ_0ck
Киборг из коробки
Одно из самых простых решений на пути к тому, чтобы сделать робота – приобрести готовый набор для робототехники с пошаговым руководством. Этот вариант подойдёт также тем, кто собирается серьёзно заниматься техническим творчеством, ведь в одном пакете находятся все необходимые детали для механики: от электронных плат и специализированных датчиков, до запаса болтиков и наклеек. Вместе с инструкциями, позволяющими создать довольно сложный механизм. Благодаря множеству аксессуаров такой робот может послужить отличной базой для творчества.
Основных школьных знаний по физике и навыков с уроков труда вполне достаточно для сборки первого робота. Разнообразные сенсоры и моторы подчиняются пультам управления, а специальные среды программирования позволяют создать настоящих киборгов, умеющих выполнять команды.
Например, датчик механического робота может фиксировать наличие или отсутствие поверхности перед прибором, а программный код указывать, в какую сторону следует поворачивать колёсную базу. Такой робот ни за что не упадёт со стола! Кстати, по схожему принципу работают настоящие роботы-пылесосы. Помимо проведения уборки по заданному расписанию и умения вовремя возвращаться на базу для подзарядки, этот интеллектуальный помощник может самостоятельно строить траектории уборки помещения. Поскольку на полу могут располагаться разнообразные препятствия, такие как стулья и провода, роботу приходится постоянно сканировать предлежащий путь и огибать такие помехи.
Для того чтобы собственноручно созданный робот умел выполнять различные команды, производители предусматривают возможность его программирования. Составив алгоритм поведения робота в различных условиях, следует создать код взаимодействия датчиков с окружающим миром. Это осуществимо благодаря наличию микрокомпьютера, являющегося мозговым центром такого механического робота.
Робот из пластиковых бутылок
Делать робота можно и из самого простого материала – пластиковых бутылок. Для поделки приготовьте:
- непрозрачную бутылку из-под колы;
- игрушечное ведерко из набора детской посуды;
- две вилки;
- три крышечки от пластиковых бутылок;
- два колеса от игрушечного автомобиля, соединенные шасси.

Снизу по бокам бутылки проделываем два отверстия, в которые продеваем шасси и прикручиваем колесики. Сгибаем две вилки – это руки – и крепим к туловищу сзади на болты. На голову надеваем ведерко, к которому прикрепляем две крышечки побольше – это глаза, и одну поменьше посередине – это рот. Украшаем робота, как подскажет фантазия.

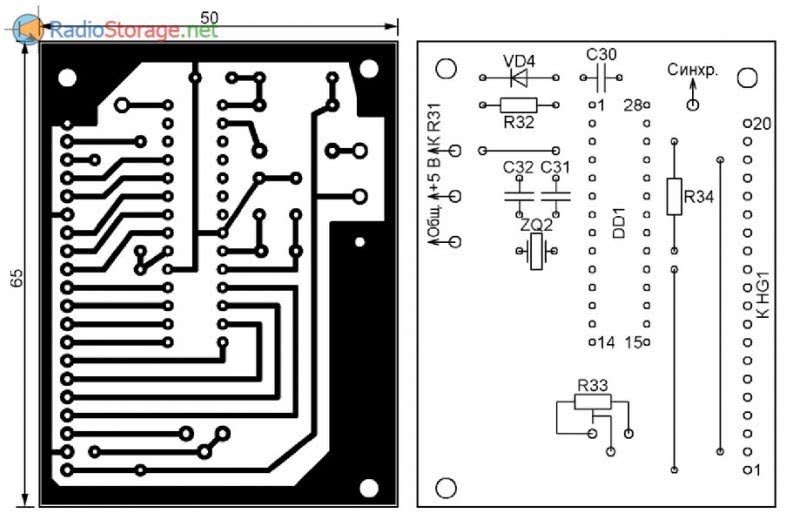
Сборка
Необходимо продумать «костяк» конструкции, на котором всё будет строиться. Обычно выбирают одну деталь, и уже к ней припаиваются все остальные. Говоря о качестве пайки, следует сказать, что места, где она будет проводиться, должны быть очищены. Также, зависимо от толщины используемых проводов и ножек, необходимо подобрать достаточное количество припоя, чтобы элементы не отпадали во время эксплуатации. Для упрощения процессов передачи сигналов и недопущения возможности замыкания можно вытравить печатную плату. Затем на неё наносятся все необходимые элементы, получившаяся конструкция подключается к источнику питания и при необходимости осуществляется доработка устройства.
Поделки из крышек
Робот из спичечных коробков
Робот, которого вы собираетесь сделать со своим ребенком, не обязательно должен быть в полную величину. Он вполне может помещаться и на ладони, оставаясь при этом абсолютно очаровательным. Для того чтобы сделать робота из спичечных коробков своими руками, возьмите 8-10 коробков, сложите из них робота и склейте коробки между собой любым клеем. Здесь возможно использование даже обычного клея-карандаша, так как коробочки очень легкие.
Теперь аккуратно кисточкой покрасьте изделие, предварительно дождавшись полного высыхания клея. Декорируйте изделие по своему вкусу.
Материалы
Существует много материалов, которые вы можете использовать для создания основания. Вы используете все множество материалов для создания не только роботов, но и других устройств. Следовательно вы получите хорошее представление о том, что наиболее подходит для данного проекта.
Список предлагаемых строительных материалов, приведенных ниже включает только наиболее распространенные. Как только вы используете некоторые из них, вы сможете поэкспериментировать с теми, которые не входят в список, или объединить их вместе.
Использовать существующие коммерческие продукты
Вероятно, вы видели школьные проекты, которые были основаны на существующих массовых продуктах. В первую очередь таких как бутылки, картонные коробки и т.д. Это, по сути, «повторное использование» продукта.
Оно может либо сэкономить вам много времени и денег. Хотя и может создать дополнительные хлопоты и головную боль. Есть много очень хороших примеров того, как перепрофилировать материалы и сделать из них очень хорошего робота.
Основной строительный материал
Например, изготовление робота из картона. Некоторые из самых основных строительных материалов могут быть использованы для создания отличных каркасов. Одним из самых дешевых и наиболее доступных материалов является картон. Вы часто можете найти картон бесплатно, и его можно легко вырезать, согнуть, склеить и сложить.
Может быть вы можете создать усиленную картонную коробку, которая выглядит намного более красиво. И она соответствует размеру вашего робота. Затем вы можете нанести эпоксидную смолу или клей, чтобы сделать ее более долговечной. В заключение дополнительно можно разукрасить ее.
Плоский материал для конструкции
Один из наиболее распространенных способов сделать раму – это использовать стандартные материалы, такие как лист фанеры, пластика или металла. И просверлить отверстия для подключения всех исполнительных механизмов и электроники. Прочный кусок фанеры может быть довольно толстым и тяжелы. В то самое время как тонкий лист металла может быть слишком гибким.
Например, доску или фанеру из плотной древесины можно легко разрезать с помощью пилы, просверлить (не опасаясь разрушения), покрасить, отшлифовать и т.д. Следовательно вы можете устанавливать устройства с двух сторон. Например, подключить двигатели и колесики колес к нижней части, а электронику и аккумулятор к верхней части. При этом древесина останется неподвижной и твердой.
Лазерная резка, изогнутый пластик или металл
Если вы находитесь на том этапе, когда вам необходим внешний блок, то лучшим вариантом будет высокоточная резка деталей лазером. Любая ошибка в расчетах будет дорогостоящей и приведет к порче материалов. Для изготовления робота нужна собственная мастерская. Возможно нужно найти компанию, производящую такой тип роботов. Может быть она предлагает множество других услуг, включая работы с металлом и покраску.
3D-печать
3D принтер, печатающий раму или каркас, редко бывает наиболее обоснованным решением (потому что он печатает послойно). В результате этого процесса можно создавать очень сложные формы. Такие формы было бы невозможно (или очень сложно) изготовить другими способами.
3D принтер
Отдельная трехмерная печатная деталь может содержать все необходимые монтажные точки для всех электрических и механических компонентов. При этом способе изготовления каркаса сохраняется незначительный вес изделия. Изготовление робота потребует дополнительной обработки и шлифовки.
Поскольку 3D-печать становится более популярной, цена на детали также снижается. Дополнительно преимуществом 3D-печати является не только то, что ваш дизайн легко воспроизводить, но и им легко делиться. При помощи нескольких кликов мышки можно получить все инструкции по дизайну и файлы САПР.
Полиморф
При комнатной температуре полиморф является твердым пластиком. При нагревании (например, в горячей воде) он становится податливым и может быть сформирован в сложные детали. Затем они охлаждаются и затвердевают в прочные пластмассовые детали.
робот из полиформа
Обычно пластиковые детали требуют высоких температур и необходимы различные формы для изготовления. Изготовление робота таким способом делает их недоступными для большинства любителей. Например, вы можете комбинировать различные формы (цилиндры, плоские листы и т.д.).
Так формируются сложные пластмассовые структуры, которые выглядят как сделанные промышленным способом. Вы также можете экспериментировать с различными формами и достичь с помощью этого материала многого.
Шаг 4. Весовые нагрузки
Движения робота возможны только благодаря действию гравитации. Для изготовления весовых нагрузок для робота я распечатал на 3D-принтере пластиковые оболочки, которые затем заполнил строительным гипсом. Перед затвердеванием гипса я вставил в оболочки распечатанную на 3D-принтере шпильку, с помощью которой можно легко манипулировать весовыми нагрузками робота.
Опытным путём я узнал, что оптимальный вес боковых весовых нагрузок составил около 300 г, а средней – около 530 г. Эти значения отлично подошли для размеров создаваемого мною робота. После того как мне стал известен вес, мне нужно было понять, какому объёму гипса он соответствует. Я провел ряд экспериментов с гипсом и рассчитал значение плотности: Rho = 1,435 кг/л.
Плотность используемого вами наполнителя может быть другой, но мне кажется, что большинство видов гипса для домашних работ, изготавливаемых из двух частей гипсового порошка и одной части воды, имеют примерно такие же значения плотности.
При расчёте объёма, необходимого для печати пластиковых оболочек, я применил расчётное значение плотности, после чего запустил 3D-печать оболочек соответствующего объёма.Теперь ценный совет: для распечатки весовых нагрузок я использовал полилактидный пластик. Это не водонепроницаемый материал, поэтому незатвердевший гипс может просачиваться через трещины в 3D-печати. Чтобы избавиться от этой проблемы, я с помощью кисти нанёс слой воска (для этого пришлось зажечь восковую свечу) на внутреннюю поверхность 3D-отпечатка. Теперь оболочка стала водонепроницаемой, и гипс будет надёжно удерживаться внутри неё вплоть до затвердевания.
Теперь нужно просто засыпать гипс в оболочки до уровня заполнения, отмеченного на рисунках. Пока гипс затвердевает, следите за держателями, чтобы они не сместились с места. Такие держатели можно удалить через 24 часа.
Шаг 5: Программа управления роботом
Главной программой, управляющей роботом, является программное обеспечение контроллера Arduino Nano. Контроллер обрабатывает входные команды, передаваемые через USB, осуществляет точные расчёты движения, посылает импульсные команды шаговым двигателям, а также перемещает манипулятор робота вверх и вниз либо для рисования линии, либо для простого перемещения по прямой.
На первом этапе можно загрузить файлы GERBER, разработанные мной для «мозга» робота, которые я заказал на сайте JLCPCB.com, любезно предоставившего спонсорскую поддержку этому проекту.На печатную плату нанесена понятная маркировка, для её изготовления используются стандартные компоненты. Процесс пайки предельно прост. Чтобы обеспечить простоту подключения/отключения двигателей, я припаял штыревые головки к шаговому двигателю и сервоприводу. Я припаял соответствующие штыревые головки к проводам сервопривода и двум шаговым двигателям.
-
Программируемый контроллер Arduino Nano.
-
2 бесшумных шаговых двигателя TMC2130.
-
4 цилиндрических алюминиевых конденсатора по 10 мкФ.
-
1 конденсатор 1206 на 330 мкФ.
-
1 конденсатор 1206 на 100 мкФ.
-
1 линейный регулятор напряжения LM7805 TO-252.
-
2 диода Шоттки MDD SS14, DO-214.
-
Нажимная кнопка 6,0×3,5 мм. Сейчас эта кнопка не задействована, я просто добавил её в конструкцию, так как она может понадобиться позже.
-
2 четырёхштырьковые гнездовые головки JST.
-
1 трёхштырьковая гнездовая головка JST.
Для подачи питания на электронные компоненты я использовал зарядное устройство для ноутбука, выдающее напряжение 19,5 В, но вполне можно использовать любой имеющийся блок питания, при условии, что он выдаёт от 7 до 35 В и не менее 1,5 А.
После завершения пайки загрузите в Arduino код (см. первый шаг).
Важное замечание: не забудьте подключить мою библиотеку fork of the stepper, которую можно загрузить из моего хранилища github. Мне пришлось исключить ненужную функцию, вызывавшую ошибку – линии рисовались не прямо, а с точкой перелома
Если бы вы знали, сколько времени у меня ушло на поиск этой неисправности и отладку!
LEGO Education Mindstorms EV3
У конструктора LEGO Mindstorms EV3 две версии — Home (домашняя) и Education (образовательная). Набор Home больше подойдет детям 5-9 лет и для игровых целей; если же ребенок старше 10 лет или всерьез увлекается программированием, то стоит купить Education — у него больше датчиков. Например, ультразвуковой сенсор в старшей модели гораздо точнее определяет расстояние, чем инфракрасный, который используется в Home. Также в обучающей версии робота есть гироскоп, датчики прикосновения и цвета.
LEGO Education Mindstorms EV3 относят к серьезной робототехнике и используют для обучения детей программированию
Из 541 детали собирают роботов для самых разных задач. Робот Color Sorter самостоятельно сортирует детали по цветам (с помощью датчика цвета), робот-сигвей ездит и балансирует на месте, робо-рука перемещает предметы, как настоящий строительный кран. Есть даже робот-собачка, которая умеет «есть», «спать», «гавкать» и реагировать на ласку.
Игрушка программируется и управляется с помощью компьютера, смартфона или планшета. Возможности LEGO Education Mindstorms EV3 можно расширить, купив дополнительный «Ресурсный набор».
Кибернетическое будущее
Подобные исследования ведут нас к инновационным разработкам в будущем. Например, создание экзоскелета для восстановления движений у полностью парализованных людей уже не кажется недостижимой фантазией — необходимо только время. Этот прогресс может сдерживать недостаточная мощность компьютеров, но за последние десять лет развитие и здесь было колоссальным. Вполне вероятно. что скоро мы увидим вокруг людей, которые используют для передвижения не коляски, а легкий, удобный экзоскелет. Люди-киборги станут для нас чем-то обыденным.
Коммерческая разработка таких систем идет по всему миру, в том числе и в России. Например, в известном проекте ExoAtlet разрабатывают экзоскелеты для реабилитации людей с двигательными нарушениями. Центр биоэлектрических интерфейсов НИУ ВШЭ поучаствовал в разработке алгоритмов для этих машин: директор Центра профессор Алексей Осадчий и его аспиранты разработали нейроинтерфейс, запускающий шагательные движения экзоскелета.

Экзоскелеты компании ExoAtlet помогают встать на ноги людям с травмами спинного мозга, перенесенным инсультом и другими нарушениями
(Фото: ExoAtlet)
Быстрое развитие человекоподобных роботов-андроидов тоже становится реальностью. Вполне вероятно, что скоро вокруг нас будут ходить роботы, которые будут имитировать нас во многих аспектах — двигаться как мы и думать как мы. Они смогут выполнять часть работы, прежде доступной только человеку.
Очевидно, что мы будем видеть развитие и робототехники, и нейронаук, и эти области будут сближаться. Это не только открывает новые возможности, но и создает новые этические вопросы: как мы должны относиться к роботам-андроидам или людям-киборгам.
И все-таки пока человек лучше, чем робот, во многих отношениях. Наши мышцы наиболее экономичны: достаточно съесть бутерброд, чтобы хватило энергии на весь день. У робота заряд батарей закончится через полчаса. И хотя может быть гораздо мощнее, чем человек, он часто оказывается слишком тяжелым. Элегантность и оптимизация энергетических затрат — тут человек пока превосходит робота.
Хотя недалеко то будущее, когда это изменится — в этом направлении работают десятки тысяч талантливых ученых и инженеров.
Подписывайтесь также на Telegram-канал РБК Тренды и будьте в курсе актуальных тенденций и прогнозов о будущем технологий, эко-номики, образования и инноваций.