Устанавливаем сенсоры на перчатке
Можем приступать к установке датчиков и нашей монтажной платы на саму перчатку. Сначала просверлите небольшое отверстие в пластике датчиков. Отверстия сверлятся в местах, где чувствительный элемент закончился
ВАЖНО! Ни в коем случае не сверлите отверстие в чувствительном материале. После этого оденьте перчатку
Сделайте отметки карандашом или ручкой на вершине каждого сустава. Эти места вы будете использовать для крепежа сенсоров. Датчики изгиба крепятся обычной ниткой. Пришейте сенсоры к перчатке. Используйте отверстие, которые вы сделали на концах датчика. В местах, где отмечены суставы сенсоры «прихватываются» нитью поверх. Более детально все это показано на фото ниже. Монтажная плата пришивается к перчатке аналогично сенсорам. Учтите, что для движения пальцев надо оставить определенный запас длины проводников. Это надо учесть при установке нашей монтажной платы и выборе длины коннекторов от нее к датчикам.
Электросхема
Можно использовать вместо резистора R1 потенциометр на 100 кОм для регулировки яркости вручную. В качестве сопротивлени R2 использовались резисторы на 118 Ом.
Перечень основных узлов, которые использовались:
- R1 — резистор на 100 кОм
- R2 — резистор на 118 Ом
- Транзистор bc547
- Фоторезистор
- 7 светодиодов
- Переключатель
- Подключение к плате Arduino
В качестве микроконтроллера использовалась плата Arduino. В качестве питания использовался блок питания от персонального компьютера. Подключив мультиметр к красному и черному кабелям, вы увидите 5 вольт (которые используются для серводвигателей и ультразвукового датчика расстояния). Желтый и черный дадут вам 12 вольт (для Arduino). Делаем 5 коннекторов для сервомоторов, параллельно подключаем позитивные к 5 В, а негативные — к земле. Аналогично с датчиком расстояния.
После этого подключите оставшиеся коннекторы (по одному с каждой сервы и два с дальномера) к распаянной нами плате и Arduino. При этом не забудьте в программе в дальнейшем корректно указать пины, которые вы использовали.
Кроме того, на плате питания был установлен светодиод-индикатор питания. Реализуется это несложно. Дополнительно использовался резистор на 100 Ом между 5 В и землей.
10 миллиметровый светодиод на роботе тоже подключен к Arduino. Резистор на 100 Ом идет от 13 пина к к позитивной ноге светодиода. Негативный — к земле. В программе его можно отключить.
Для 6 серводвигателей использовано 6 коннекторов, так как 2 серводвигателя снизу используют одинаковый сигнал управления. Соответствующие проводники соединяются и подключаются к одному пину.
Повторюсь, что в качестве питания используется блок питания от персонального компьютера. Либо, конечно, вы можете приобрести отдельный источник питания. Но с учетом, того, что у нас 6 приводов, каждый из которых может потреблять около 2 А, подобный мощный блок питания обойдется недешево.
Обратите внимание, что коннекторы от серв подключаются к ШИМ-выходам Arduino. Возле каждого такого пина на плате есть условное обозначение ~
Ультразвуковой датчик расттояния можно подключить к пинам 6, 7. Светодиод — к 13 пину и земле. Это все пины, которые нам понадобятся.
Теперь мы можем перейти к программированию Arduino.
Перед тем как подключить плату через usb к компьютеру, убедитесь, что вы отключили питание. Когда будете тестировать программу, также отключайте питание вашей робо-руки. Если питание не выключить, Arduino получит 5 вольт от usb и 12 вольт от блока питания. Соответственно, мощность от usb перекинется к источнику питания и он немного «просядет».
На схеме подключения видно, что были добавлены потенциометры для управления сервами. Потенциометры не являются обязательным звеном, но приведенный код не будет работать без них. Потенциометры можно подключить к пинам 0,1,2,3 и 4.
Сборка манипулятора
Для начала необходимо собрать пять частей:
В основании необходимо использовать винты с готовкой в потай. Придется немного рассверлить отверстия, чтобы рука могла поворачиваться.
После того как эти части собраны остается только прикрутить их к качалкам сервоприводов и накинуть тяги для позиционирования инструмента. Достаточно трудно прикрутить именно два привода в основании:
Сначала необходимо установить шпильку длиной 40мм (показана желтой линией на фото), а затем прикрутить качалки. Для шарниров мы использовали обычные винты М3 и гайки с нейлоновой вставкой для предотвращения самораскручивания. Эти гайки хорошо видно на конце манипулятора:
Пока это просто плоская площадка на которую мы для начала планируем приделать лампочку.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Основные характеристики
При изготовлении самодельной кран-балки лучше ориентироваться на технические параметры моделей заводского изготовления. Эти характеристики рассчитывались квалифицированными специалистами, поэтому оптимально подойдут для многоцелевого применения.
Характеристики различных модификаций могут отличаться, но в целом, это выглядит так:
- Рабочая зона. Длина пролёта варьируется в пределах 3-28.5 метров. Ориентироваться на этот показатель не стоит: не каждый гараж обладает такой площадью, поэтому длина кранового пути подбирается исходя из фактического размера помещения.
- Высота подъема. Промышленные подъемники поднимают груз на высоту 6-18 метров. Для частного применения, можно остановиться на минимальном варианте. Например, если речь идет о простом тельфере для трактора или легкового авто, достаточно высоты подъема в 1.5 метра.
- Напряжение. Электрооборудование работает от трехфазной сети в 380В. Если предполагается установка грузоподъемного устройства с ручным приводом, этот параметр неактуален.
- Диапазон рабочих температур. Заводские модели корректно работают при температуре -20/+40 градусов. Этот параметр нужно учитывать при выборе комплектующих деталей.
Проектирование антропоморфного манипулятора c 7 степенями
Всем привет! Уже почти год ничего нового не публиковалось по поводу судьбы сервисного робота Tod Bot. Однако, все это время мы не сидели сложа руки, и сегодня можем рассказать о достигнутых успехах. Данный пост не претендует на рецепт проектирования, а только лишь описывает наш путь.
Занимаясь нашим проектом, мы дошли до задач захвата предметов манипулятором. На тот момент у нас уже были решены такие задачи, как распознавание предметов и управления манипулятором. Манипулятор был сделан из конструктора и использовал обычные сервоприводы, и его грузоподъёмность и возможность управления скоростью оставляли желать лучшего(контроллер, который мы использовали, не поддерживал динамическое управление скоростью сервоприводами). Тогда перед нами стал выбор: заказать новый контроллер и использовать то, что уже есть или же решить проблему кардинально и получить манипулятор, который бы нас устраивал по всем параметрам.
Приобретать манипулятор, который бы отвечал всем требованиям даже и не думали – бешеных денег стоит. Поэтому решили пойти самым тернистым, но и сам интересным путем — сконструировать свой собственный. Первым делом был сформирован список основных характеристик:
- Количество степеней: 7
- Грузоподъемность/Рабочий вес: 2 – 3 кг
- Длинна манипулятора: 90 см
- Вес манипулятора: 6-8 кг
Почему именно такие характеристики? Ну, начнем с веса… Так как манипулятор планируется ставить на мобильную платформу, то его масса является существенным критерием и чем легче будет манипулятор, тем лучше.
С выбором длины манипулятора ориентировались на размер руки человека с небольшим запасом, т.к. практически все предметы быта находятся на расстоянии вытянутой руки.
Рабочий вес определялся исходя из некоторой статистики. В бытовом окружении, предметы, рассчитанные на поднятие одной рукой, по своей массе находятся в пределах до 1 кг. Самым тяжелым является чайник, масса которого может достигать 2 кг или около того.
Самым интересным было определиться с количеством степеней. Для успешного захвата предмета в пространстве достаточно минимум 4-х степеней свободы. Но так как мы уже успели освоить ПО для управления манипулятором с 6 – 7 степенями и очень хотелось опробовать его на деле, то решили собрать железку для него. Такое количество степеней позволяет выполнять более сложные и функциональные движения. Как говориться, больше — не меньше.
Когда и кому может пригодиться
Прежде чем рассказать о том, как делается и устанавливается самодельный кран-манипулятор на прицеп легковой машины, стоит затронуть тему необходимости такой конструкции. Соглашусь, что далеко не всем и не всегда он может пригодиться.
Наличие крана-манипулятора на легковом прицепе расширяет его функциональные возможности, увеличивает эксплуатационные характеристики. Если вам приходится регулярно перевозить какие-то тяжелые предметы, при этом отсутствует самосвальный механизм на прицепе, можно воспользоваться подъемным краном. Обладая определенными параметрами грузоподъемности, он даст возможность поднимать на борт и спускать с него грузы разного типа. Актуально для строителей, ремонтников, дачников и просто хозяйственников.
Фактически это альтернатива для ручной лебедки на прицепе. Но только кран обладает более широкой сферой применения. Этот вопрос стоит рассмотреть на конкретных примерах.
Возможности прицепа с краном во многом зависят от того, какая грузоподъемность самого автоприцепа и непосредственно созданного своими руками крана. Некоторые модели способны поднять две тонны, но если платформа прицепа на такой груз не рассчитана, могут возникнуть проблемы при эксплуатации и перевозках.
Что же касается непосредственной сферы применения, то тут можно выделить несколько примеров.
Если вы установите на свой автоприцеп кран-манипулятор, то сможете использовать его:
Вариантов на самом деле много. Они лишь ограничены задачами, которые стоят перед вами, и эксплуатационными характеристиками созданного прицепа с краном-манипулятором.
Искуственная рука или что управляет манипуляторами
Продолжаем знакомится с визуальным программированием контроллера Arduino в программе XOD IDE
Ш аговый двигатель 28BYJ-48
Двигатель 28BYJ-48
относится к бюджетным четырёх фазным шаговым двигателям и работает с драйвером на микросхемеULN2003. Я не буду вдаваться в подробности и принцип работы шагового двигателя, так как всё это можно найти в интернете, причём в статьях, очень похожих друг на друга.
Хочется уже подключить и опробовать.
Подключил по такой схеме.
Вам потребуются компоненты:
Светодиоды и резисторы на 220 Ом
можно не использовать, но я их установил для индикации состояния кнопок.
Питание на плату драйвера необходимо подавать не с платы Arduino +5V (на схеме обозначено) .
Ток шагового двигателя 28BYJ-48
, каждая обмотка 160 мА (в 4-шаговом режиме 320 мА, при быстром вращении 200 мА), не стоит рисковать.
Максимальный выходной ток пина 5V: 800 мА
Теперь сам алгоритм подключения в программе XOD IDE,
но сначала нужноскачать библиотеку шагового двигателя 28BYJ-48. Как установить подобную библиотеку описано здесь.
Хочется добавить кое что по поводу узла stepper-28byj48.
Правильнее было назвать пины не по цветам, а как обозначено на драйвере.
Это будет в таком порядке:
- IN1- голубой BLU
- IN2 — розовый PNK
- IN3 — жёлтый YLL
- IN4 — оранжевый ORG
Так было бы на много удобнее.
Ну а теперь сам алгоритм для управления шаговым двигателем 28BYJ-48
Скачать готовый скетч можно здесь .
Теперь стоит описать как работает алгоритм.
Работа алгоритма шагового двигателя 28BYJ-48
При включении
контроллера Arduino загораетсякрасный и жёлтыйсветодиоды .
Это означает, что драйвер двигателя отключен (о чём информирует красный светодиод
), но при включении драйвера (после нажатия на кнопкуbutton 3) ,красный светодиод погаснет , а шаговый двигатель при нажатии на кнопкиbutton 1 будет вращаться против часовой стрелки.
Кнопка button 2
переключает триггерflip-flop меняя значениеправда-ложь , соответственно меняет направление вращения шагового двигателя.
Насосы для гидросистемы
При выборе насосов ориентируются только на требования гидросистемы конкретной модели манипулятора и на возможность сопряжения с конкретной КОМ. То есть, насос должен обеспечивать необходимые для манипуляторной установки давление и производительность. Эти характеристики можно уточнить как в технической документации, так и на табличке с основными характеристиками оборудования.
https://youtube.com/watch?v=ZpPD-8wRAzg
Большинство крано-манипуляторных установок рассчитаны на давление в гидросистеме в диапазоне от 180 до 220 атмосфер. Соответственно и насосы для КМУ выполняются с учетом возможности обеспечения такого давления. Однако нередки исключения. Например, отечественные насосы НШ третьей серии обеспечивают давление не более 160 атмосфер.
Гидравлические шланги высокого давления подключаются к насосам. Проверяется герметичность соединений и правильность соединения всех элементов, подключается другое оборудование.
Выбор манипуляторной установки
В настоящее время на рынке можно найти множество различных КМУ, различающихся грузовым моментом, максимальной грузоподъемностью, длиной стрелы и другими возможностями. При выборе манипулятора обязательно учитывается грузоподъемность базового автомобиля и другие его характеристики.
Грузовые автомобили средней (3-5 т) и малой (1-2 т) грузоподъемности оснащаются манипуляторными установками малых размеров с максимальной грузоподъемностью 1-3 т. Они отличаются высокой маневренностью и гибкостью, которая позволяет им выполнять работы в стесненных и ограниченных условиях, недоступных для больших КМУ.
Тяжелые грузовики оснащаются манипуляторными установками с грузоподъемностью до 25 т и вылетом стрелы 20 м и более. Такая техника способна подавать грузы на нижние этажи зданий прямо с грузовика, минуя этап их промежуточного складирования.
https://youtube.com/watch?v=BU0PGRyO0W4
https://youtube.com/watch?v=igylRmpcpbo
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом. Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату . С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
https://youtube.com/watch?v=jozshuI246o
https://youtube.com/watch?v=onQIzR5C8qk
https://youtube.com/watch?v=NkxTk2-RJ8A
Когда и кому может пригодиться
Прежде чем рассказать о том, как делается и устанавливается самодельный кран-манипулятор на прицеп легковой машины, стоит затронуть тему необходимости такой конструкции. Соглашусь, что далеко не всем и не всегда он может пригодиться.

Наличие крана-манипулятора на легковом прицепе расширяет его функциональные возможности, увеличивает эксплуатационные характеристики. Если вам приходится регулярно перевозить какие-то тяжелые предметы, при этом отсутствует самосвальный механизм на прицепе, можно воспользоваться подъемным краном. Обладая определенными параметрами грузоподъемности, он даст возможность поднимать на борт и спускать с него грузы разного типа. Актуально для строителей, ремонтников, дачников и просто хозяйственников.
Фактически это альтернатива для ручной лебедки на прицепе. Но только кран обладает более широкой сферой применения. Этот вопрос стоит рассмотреть на конкретных примерах.

Возможности прицепа с краном во многом зависят от того, какая грузоподъемность самого автоприцепа и непосредственно созданного своими руками крана. Некоторые модели способны поднять две тонны, но если платформа прицепа на такой груз не рассчитана, могут возникнуть проблемы при эксплуатации и перевозках.
Что же касается непосредственной сферы применения, то тут можно выделить несколько примеров.
Если вы установите на свой автоприцеп кран-манипулятор, то сможете использовать его:
- для леса;
- для поднятия бочек;
- погрузки стройматериалов;
- работы с крупногабаритными предметами;
- переноса груза с места на место в небольшом радиусе;
- поднятия грузов на высоту;
- транспортировки досок и бревен;
- загрузки лодки;
- перевозки мототехники;
- сельскохозяйственных работ;
- в строительных целях и пр.
Вариантов на самом деле много. Они лишь ограничены задачами, которые стоят перед вами, и эксплуатационными характеристиками созданного прицепа с краном-манипулятором.

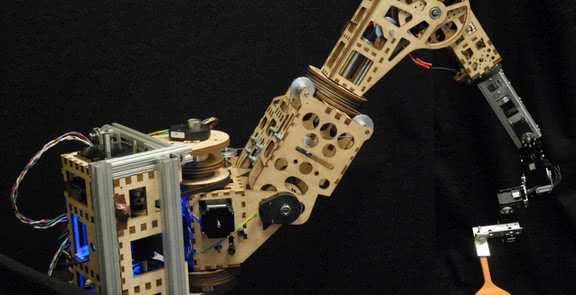
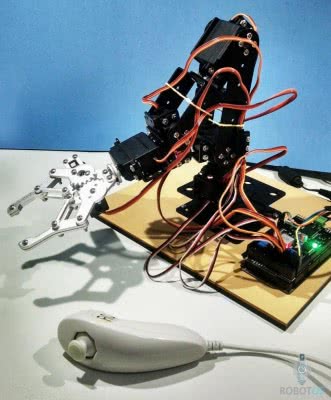
Тестирование работы роботизированной руки
Сделайте все соединения, которые показаны на выше приведенной схеме, и загрузите программу в плату Arduino. Подайте питание на плату Arduino Nano через порт USB с вашего компьютера и откройте окно монитора последовательной связи – в нем вы увидите приветственное сообщение.
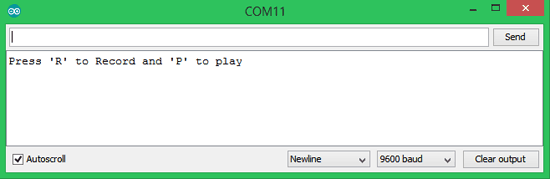
Теперь введите R в окне монитора последовательной связи и нажмите ввод. Внизу монитора последовательной связи должна быть установлена опция Newline. Пример работы программы в этом режиме показан на следующем рисунке:
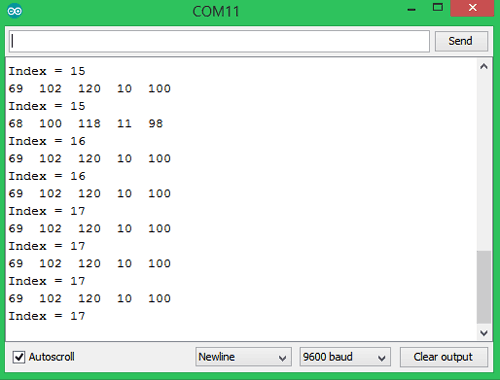
Информация, показанная на этом рисунке, может быть использована для отладки. Цифры, начинающиеся с 69, это текущая позиция сервомоторов с 0-го до 5-го. Значения индекса – это размер массива. Помните, что максимальный размер массива ограничен 700 числами, поэтому старайтесь не превышать этот размер. После того как вы завершите запись нажмите P и ввод в окне монитора последовательной связи и программа переключится в режим воспроизведения и на экране тогда появится примерно следующая картина:
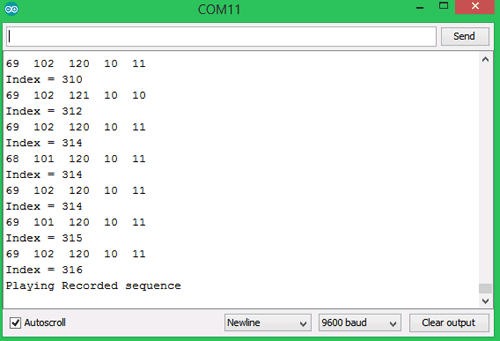
Во время режима воспроизведения роботизированная рука будет повторять те же самые движения, которые она совершала в режиме записи. Эти движения она будет выполнять снова и снова до тех пор пока вы не прервете ее работу из окна монитора последовательной связи.
Популярные модели
Краны-манипуляторы производятся в:
Выбрать модель силовой установки можно из таких торговых марок ведущих мировых производителей:

Установки Foton имеют показатель грузоподъемности 6 т, а их длина — больше 6 м. Foton Олли перевозит грузы и полезен в строительных работах.
Крановая установка Isuzu QL 1100 TMA является одной из новинок японской компании. Грузоподъемность — 5,5 т, длина около 6 м.
Кран-манипулятор Hiab 600EP5HiPro поднимает грузы до 16 т. Его можно использовать для перемещения крупно- и негабаритных грузов. Оснащен пультом для дистанционного управления. Данное устройство способно поднимать грузы, которые расположены возле его колес.
Мини-кран перемещает груз весом до 3 т. Популярные модели :
- СОРОКИН 8.10.
- АЕ&Т 1т Т62201.
- АЕ&Т 1т Т62101.
- СОРОКИН 8.6.
- СОРОКИН8.2.
- СОРОКИН 8.22.
- СОРОКИН 8.3.

Подходящая крановая установка на Газель должна поднимать вес 800 кг. Это такие модели:
- РМ 3622 СЕ, производитель — Италия, монтируется за кабиной;
- Unik URA — 100, производитель — Япония, монтируется внутри бортовой платформы.
Газель с КМУ подходит для транспортировки крупногабаритных и легких грузов, а также для погрузочно-разгрузочных работ.
Искуственная рука или что управляет манипуляторами
Продолжаем знакомится с визуальным программированием контроллера Arduino в программе XOD IDE
Ш аговый двигатель 28BYJ-48
Двигатель 28BYJ-48
относится к бюджетным четырёх фазным шаговым двигателям и работает с драйвером на микросхемеULN2003. Я не буду вдаваться в подробности и принцип работы шагового двигателя, так как всё это можно найти в интернете, причём в статьях, очень похожих друг на друга.
Хочется уже подключить и опробовать.
Подключил по такой схеме.
Вам потребуются компоненты:
Светодиоды и резисторы на 220 Ом
можно не использовать, но я их установил для индикации состояния кнопок.
Питание на плату драйвера необходимо подавать не с платы Arduino +5V (на схеме обозначено) .
Ток шагового двигателя 28BYJ-48
, каждая обмотка 160 мА (в 4-шаговом режиме 320 мА, при быстром вращении 200 мА), не стоит рисковать.
Максимальный выходной ток пина 5V: 800 мА
Теперь сам алгоритм подключения в программе XOD IDE,
но сначала нужноскачать библиотеку шагового двигателя 28BYJ-48. Как установить подобную библиотеку описано здесь.
Хочется добавить кое что по поводу узла stepper-28byj48.
Правильнее было назвать пины не по цветам, а как обозначено на драйвере.
Это будет в таком порядке:
- IN1- голубой BLU
- IN2 — розовый PNK
- IN3 — жёлтый YLL
- IN4 — оранжевый ORG
Так было бы на много удобнее.
Ну а теперь сам алгоритм для управления шаговым двигателем 28BYJ-48
Скачать готовый скетч можно здесь .
Теперь стоит описать как работает алгоритм.
Работа алгоритма шагового двигателя 28BYJ-48
При включении
контроллера Arduino загораетсякрасный и жёлтыйсветодиоды .
Это означает, что драйвер двигателя отключен (о чём информирует красный светодиод
), но при включении драйвера (после нажатия на кнопкуbutton 3) ,красный светодиод погаснет , а шаговый двигатель при нажатии на кнопкиbutton 1 будет вращаться против часовой стрелки.
Кнопка button 2
переключает триггерflip-flop меняя значениеправда-ложь , соответственно меняет направление вращения шагового двигателя.
Манипулятор своими руками на прицеп: как сделать и установить

Здравствуйте, дорогие друзья! Сегодня мы поговорим про достаточно необычное, но для многих полезное и необходимое решение. Это манипулятор своими руками, который можно установить на обычный прицеп.
Кто-то подобные конструкции устанавливает на ГАЗ 53 непосредственно на кузов, либо же на ЗИЛ и на Газель. Другие же используют простые легковые прицепы , совершенствуя их конструкции и расширяя эксплуатационные возможности.
Каким именно будет манипулятор, решать вам. Это может быть гидравлический или ручной с механическим приводом, фактически зависящем от ваших усилий. Это вопрос к тому, какую конкретно лебедку вы купите для реализации поставленной цели.

В процессе
- Важный совет новичку, в том, как работать на КМУ — все манипуляции должны быть плавными. Например, при поднятом грузе резкие движения ведут к перегрузкам, поломкам и даже опрокидыванию автомобиля. При работе стрелой ниже поверхности, работать надо еще медленнее.
- Колонну установки вращают медленно во избежание избыточных динамических нагрузок.
- Заниженная скорость работы крановой установки вызывает перебои в работе двигателя, а те в свою очередь — колебания груза.
- Не работать во время грозы.
- Не приближаться к линиям электропередач.
- Не работать при с КМУ ветре более 10 м/сек.
- Пока груз в работе, покидать рабочее место нельзя.
- Аутригеры устанавливают на максимальную ширину (чем они шире, тем устойчивее кран и выше его грузоподъемность) и только на твердую и ровную поверхность. Если это невозможно, используют специальные подставки.
- Аутригеры должны стоять так, чтобы колеса машины тоже твердо стояли на земле, а не висели в воздухе.
- Аутригеры КМУ нельзя поднимать при выдвинутой стреле или поднятом грузе.
- Никаких посторонних лиц в зоне манипуляций крана или в кабине грузовика.
Какие меры безопасности должны соблюдаться при выполнении работ по установке КМУ?
Чтобы кран не перемещался по отношению к плоскости рамы, к подрамнику сзади и спереди должны быть приварены уголки размером 40 либо 50 мм, обеспечивающие прочную фиксацию установки. В момент крепления кузова к подрамнику между кузовом и КМУ следует оставить зазор около 200 мм. С помощью болтов к подрамнику производится крепление поперечин кузова. После этого для работы манипулятора должен быть подключён гидравлический насос.
Установка крана на грузовой автомобиль достаточно сложная работа, требующая большой ответственности. Поэтому при невозможности выполнения её самостоятельно лучше воспользоваться готовыми услугами крана-манипулятора
, предлагаемыми нашей фирмой. В таком случае будет гарантировано профессиональное выполнение работ, что позволит избежать таких проблем, как ремонт рамы в результате образования в ней трещины.
Кран-манипулятор — это силовая установка, монтируемая на подвижные платформы. Она поднимает и переносит тяжелые грузы за короткий промежуток времени. Такое оборудование можно сделать самостоятельно и установить самодельный кран в кузов грузовика.
Шаг 10. Схема подключения
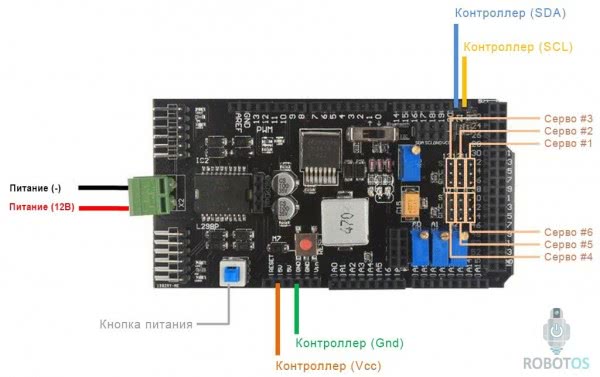
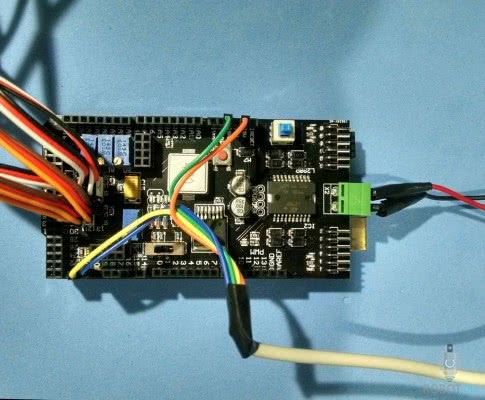
Как только Вы соберёте манипулятор, и подготовите разъем Nunchuk, Вы будете готовы что бы собрать электросхему. Мы использовали щит платы управления, который был в комплекте вместе с комплектом манипулятора. Это упрощает подключение компонентов, поскольку в нем уже имеются специальные разъемы для сервомоторов, источника питания и т. д.
Подключите компоненты следующим образом:
Контроллер:
- Контроллер контакт 6 (SCL) => Arduino Mega Контакт 21 (SCL) (на плате)
- Контроллер контакт 1 (SDA) => Arduino Mega Контакт 20 (SDA) (на плате)
- Контроллер контакт 3 (Vcc) => Ardino Mega Контакт 3V3 (на плате)
- Контроллер контакт 4 (Gnd) => Arduino Mega Контакт Gnd (на плате)
Если вы используете Arduino Uno, контакты Nunchuk SCL и SDA должны быть подключены к контактам Arduino следующим образом:
- Контроллер контакт 6 (SCL) => Arduino Uno контакт A5
- Контроллер контакт 1 (SDA) => Arduino Uno контакт A4
- Контроллер контакт 3 (Vcc) => Ardino Uno контакт 3V3
- Контроллер контакт 4 (Gnd) => Arduino Uno контакт Gnd
Сервопривод:
- Контакт Платы управления 11 => Сервопривод № 1
- Контакт Платы управления 12 => Сервопривод №2
- Контакт Платы управления 13 => Сервопривод № 3
- Контакт Платы управления 8 => Сервопривод № 4
- Контакт Платы управления 9 => Сервопривод №5
- Контакт Платы управления 10 => Сервопривод №6
Если вы не используете плату управления, Вы должны использовать следующую конфигурацию контактов:
- Arduino Контакт 11 => Серво #1 (Sgn)
- Arduino Контакт 12 => Серво #2 (Sgn)
- Arduino Контакт 13 => Серво #3 (Sgn)
- Arduino Контакт 8 => Серво #4 (Sgn)
- Arduino Контакт 9 => Серво #5 (Sgn)
- Arduino Контакт 10 => Серво #6 (Sgn)
- Arduino Контакт Gnd => Серво Gnd
- 6В Контакт питания => Серво Vcc
Вам также необходимо подключить внешний источник питания 12 В. Мы предлогаем использовать один блок с выходом более 2A. Сервоприводы потребляют много энергии, и если блок питания недостаточно мощный, сервоприводы будут вибрировать и перегреваться. Они также потеряют свою мощность.
Не подключайте источник питания до тех пор, пока Вы не загрузите код Arduino (см. Дальнейшие шаги). На плате есть кнопка питания. Держите её в выключенном положении.
Подключите USB-кабель к Arduino и перейдите к следующему шагу.
Популярные модели
Краны-манипуляторы производятся в:
Выбрать модель силовой установки можно из таких торговых марок ведущих мировых производителей:

Установки Foton имеют показатель грузоподъемности 6 т, а их длина — больше 6 м. Foton Олли перевозит грузы и полезен в строительных работах.
Крановая установка Isuzu QL 1100 TMA является одной из новинок японской компании. Грузоподъемность — 5,5 т, длина около 6 м.
Кран-манипулятор Hiab 600EP5HiPro поднимает грузы до 16 т. Его можно использовать для перемещения крупно- и негабаритных грузов. Оснащен пультом для дистанционного управления. Данное устройство способно поднимать грузы, которые расположены возле его колес.
Мини-кран перемещает груз весом до 3 т. Популярные модели :
- СОРОКИН 8.10.
- АЕ&Т 1т Т62201.
- АЕ&Т 1т Т62101.
- СОРОКИН 8.6.
- СОРОКИН8.2.
- СОРОКИН 8.22.
- СОРОКИН 8.3.

Подходящая крановая установка на Газель должна поднимать вес 800 кг. Это такие модели:
- РМ 3622 СЕ, производитель — Италия, монтируется за кабиной;
- Unik URA — 100, производитель — Япония, монтируется внутри бортовой платформы.
Похожие записи:
 Самодельная кабина на минитрактор своими руками
Самодельная кабина на минитрактор своими руками
 Инструкция по утеплению стен с внутренней стороны
Инструкция по утеплению стен с внутренней стороны
 Вертушка от кротов на участке своими руками
Вертушка от кротов на участке своими руками
 Diy: формочка для конфет или льда своими руками
Diy: формочка для конфет или льда своими руками
 Всё о устройстве и конструкции вальмовой крыши + вентиляция мансарды и чердака четырехскатной кровли
Всё о устройстве и конструкции вальмовой крыши + вентиляция мансарды и чердака четырехскатной кровли
 Сеянный грунт: инструкция по выбору и использованию
Сеянный грунт: инструкция по выбору и использованию