ЧПУ станок из дерева
Для него нужна Аrduino uno R3, G-сode Sender и GRBL. Необходимо заранее подготовить материалы и компоненты: фанеру, гайки с болтами, резьбовой вал и стержни из стали, шарикоподшипники, ШД Nema 23 и драйвера к ним, источник питания 24 В, 15 А, втулки из капролона, фторопласта и металла, провода.
Многое, входящее в электронику, прислали из Китая.
Основанием служат бруски из древесины с глухими, сквозными отверстиями. Стальной резьбовой вал, установленный по центру станка, служит приводом для оси Х. В момент его вращения – каретка (рабочий стол) выполняет перемещение вдоль этой оси Х.
ВНИМАНИЕ: чём толще фанера или деревянный брусок, тем меньшей будет вибрация, выше точность позиционирования. Портал (ось Y) устанавливают на подвижном столе, фиксируя гайкой под столом
Ось Z служит для перемещения рабочего органа (он подает инструмент в вертикальном положении)
Портал (ось Y) устанавливают на подвижном столе, фиксируя гайкой под столом. Ось Z служит для перемещения рабочего органа (он подает инструмент в вертикальном положении).
Для сборки понадобятся болты и гайки. Не стоит склеивать поломанные делали, лучше их заменить новыми. Подключая Arduino, ШД и драйверы к каждому из них, надо предусмотреть и блоки питания для них. Загрузив и настроив код GRBL, можно открыть G-сode Sender и подключить Arduino к ПК. Плата готова участвовать в процессе управления чпу станком.
https://youtube.com/watch?v=MhSqkD1n_10
https://youtube.com/watch?v=teGEFvkMluQ
Зачем нужны шилды
Обладатели самодельных устройств наслышаны о платах расширения – Arduino cnc shield, применение которых расширяет функционал фрезерного оборудования.
Обычно шилду изготавливают под форм-фактор платы. Используют и несколько шилдов одновременно, устанавливая их на микроконтроллер (один на другой). Спектр их применения:
- при помощи официального устройства Arduino – Ethernet cnc shield можно добиться независимости проекта от ПК, да и для хостинга веб-сервера его используют,
- 4 Relay Shield – возможность для того, чтобы подключать 4-х периферийные устройства,
https://youtube.com/watch?v=1ZX3qf8x9iA
- Рrotoshield – весьма полезный шилд в момент, когда собирается схема,
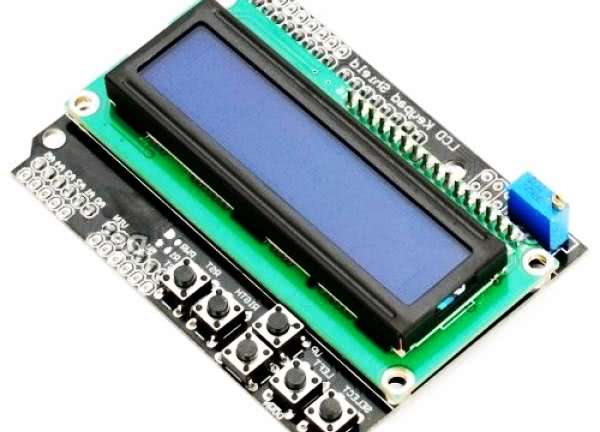
- LCD Shield позволяет информацию с Arduino выводить напрямую на периферийный экран,
- еnergy Shield – расширенные возможности для питания на Arduino. Реальна подзарядка мобильников и гаджетов,
- мotor shield обеспечивает управление большим числом моторов и их защиту,
- SD Card Shield служит для обработки и хранения больших массивов информации,
- Wi-fi Shield, подключенный к серийному порту, обеспечит дистанционное управление приводами роботизированных проектов,
- GPRS Shield оснащается антеннами для использования сети GSM/GPRS,
- E-Ink shield – путь для использования технологии электронных чернил, дисплею нужен для питания минимум энергии,
- мusic Shield способен воспроизводить музыку через Arduino в отличном качестве.
Реально создать лазерный 3D принтер, ЧПУ станок, употребляя бюджетные платы Arduino. С платой расширения CNC Shield можно работать на станках с числовым программным управлением, в гравировальной или фрезерной машине. А шилд для управления тремя ШД (трехосевой станок) имеет три разъема, чтобы не было проблем с каждым драйвером при подключении.
https://youtube.com/watch?v=3El2sW1eJ-g
Лазерный станок с ЧПУ на основе Arduino UNO
Всем доброго времени суток! Сегодня я хочу рассказать вам о том, как собрать лазерный станок с ЧПУ (числовое программное управление, то есть управление через компьютер). Делается он на основе CD-приводов и Arduino UNO. Он получается довольно маленьким и слабым в отличие от других лазерных станков. Но его хватит для выжигания на дереве, коже, пластмассе и на других легкоплавких материалах. Итак, приступим.
Для создания нам понадобится: 1 – два CD-привода. Их можно найти в старых запасах, либо купить у кого-нибудь. Лично я купил их на авито за 150 рублей.
2 – Arduino UNO.
3 – CNC шилд версии 3.0 либо другой.
4 – два драйвера шаговых двигателей. Я рекомендую использовать драйверы DRV8825, так как они имеют режим микрошага до 32.
5 – самой главной частью является лазер. Лазер мощностью 200-300 мВатт стоит около 500-700 рублей. 6 – блок питания 12 вольт и минимум 1.5 ампер.
Первый шаг – это конструкция станка. Тут все зависит от вашей фантазии и от материалов, которые имеете. Я сделал основание из корпуса от привода. Можно также сделать из дерева или пластмассы. Ось Х нужно закрепить над осью У
Очень важно выдержать все углы 90 градусов
Из приводов надо достать каретки
Обратите внимание на тип двигателя у каретки. Если он имеет 2 контакта, то он не подходит
Шаговый двигатель имеет 4 контакта.
Каретки закрепляем как на фото.
Сопряжаем шилд и ардуино. На шилде есть режим деления шага. Чтобы активировать этот режим, нужно установить перемычки. Вот фото режимов:
Устанавливаем драйверы на их законное место согласно ключу, то есть как на фото:
Подключаем двигатели. Возле посадочных мест есть 4 разъема, к которым и надо подключить.
Лазер подключается в зависимости от прошивки. Если в описании к вашей версии прошивки GRBL подписано наличие ШИМа, то подключать нужно к разъему Z+, иначе к Spn En. Так как лазер потребляет ток выше, чем выдает ардуино, нужно запитать его от внешнего источника. Я подключил с помощью транзистора KT805AM к USB. Вот схемка.
Кстати, шилд нужно запитывать блоком питания 12 вольт. На плате все подписано (куда подключать). Для компактности я разместил всю электронику под корпусом станка.
Лазер я закрепил стяжками на кусочек радиатора, который, в свою очередь, закреплен винтами на движущейся части каретки.
К нижней каретке нужно приделать рабочее поле. У меня это кусок доски деревянной.
Для того, чтобы во время работы линза лазера не закоптилась, я приделал кулер (он сдувает дым).
Переходим к программной части. Скачиваем с гитхаба прошивку GRBL нужной версии в виде архива. Распаковываем и для продолжения устанавливаем Arduino IDE (все ПО предоставлено в бесплатном доступе). Из архива копируем папку grbl и вставляем в папку lib (находится в корневой папке программы). Запускаем программу и в настройках выбираем com-порт к которому заранее подключили ардуино. В тех же настройках выбираем тип платы UNO. Во вкладке «скетч» выбираем Подключить библиотеку> GRBL. После этого нажимаем кнопку загрузить скетч и ждем. Поздравляю, плата прошита. Теперь ее нужно настроить. Открываем последовательный порт кнопкой «монитор порта». Выбираем снизу скорость 115200 бод. Далее в строку вводим «$» и отправляем. В ответ выводится список всех настроек пришивки. Нас интересуют пункты 100 и 101. Там нужно выбрать скорость. Рассчитывается она следующим образом: число шагов на оборот делим на длинну шага винта. Потом умножаем на микрошаг. Если вы выбрали микрошаг 32, то расчет такой: 20/3*32 = 213,333. Это значение записываем в строку: $100 = 213,333 и отправляем. Аналогично и для 101.
Готовимся к проверке. Скачиваем любую программу для работы с прошивкой grbl. Рекомендую grbl controller или GRBLmaster. В интернете можно найти инструкции по использованию этих программ, поэтому я на этом зацикливаться не буду. Проверяем как движутся каретки. Если их направление неправильное, то перетыкиваем местами их провода на плате. То есть первые два провода ставим на место последних двух и наоборот. Теперь попробуем выжечь что-нибудь! Я выжигаю на коже. Перед выжиганием настраиваем фокусировку лазера. Делается это просто. В программе включаем лазер и настраиваем до тех пор, пока точка не станет маленькой. Вот примеры моих работ:
p.s. Не забывайте про безопасность! Ни в коем случае не направляйте лазер на человека, иначе можно лишить его зрения. Рекомендую купить для работы с лазером специальные очки.
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
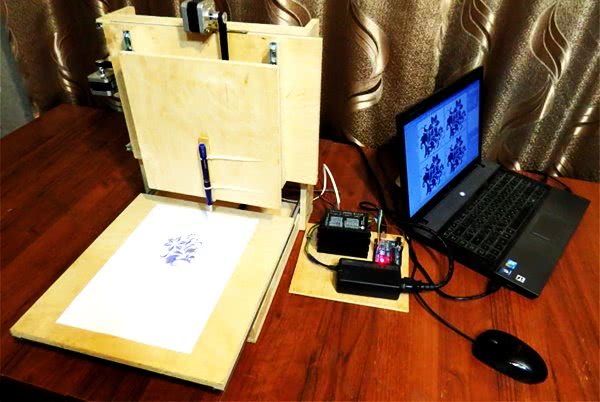
Написание программы управления плоттером для Arduino и тестирование проекта
Перед началом написания программы необходимо удостовериться в том, подключены ли шаговые двигатели и работают ли они корректно.
Поскольку в нашем проекте мы используем шилд драйвера двигателей L293D нам необходимо скачать библиотеку AFmotor Library. Затем добавьте ее в каталог библиотек Arduino IDE. Переименуйте его в AFMotor. Если у вас открыта Arduino IDE, то закройте ее и снова откройте (то есть перезапустите), кликните на пункт меню file -> examples -> Adafruit Motor Shield Library -> stepper. Убедитесь в том, что вы выбрали правильный COM порт и плату Arduino и затем загрузите код этого примера в вашу плату Arduino. После этого на шаговом двигателе 1 вы должны наблюдать некоторые движения.
Для того чтобы протестировать работу шагового двигателя 2 измените порт двигателя с 2 на 1 в следующем фрагменте кода и снова загрузите код примера в плату Arduino.
Arduino
#include <AFMotor.h>
// Connect a stepper motor with 48 steps per revolution (7.5 degree)
// to motor port #2 (M3 and M4)
AF_Stepper motor(48, 2);
|
1 |
#include <AFMotor.h> AF_Steppermotor(48,2); |
Код программы для Arduino
Теперь, когда вы убедились в том, что шаговые двигатели функционируют, скопируйте код Arduino для нашего плоттера (приведен в конце статьи, также его можно скачать по этой ссылке) и загрузите его в плату Arduino.
G-код (G-Code) для плоттера с ЧПУ
G-код представляет собой язык, на которым мы говорим машине с числовым программным управлением (ЧПУ) что она должна делать. В основном он содержит координаты X, Y и Z.
Пример этого кода:
Arduino
G17 G20 G90 G94 G54
G0 Z0.25X-0.5 Y0.
Z0.1
G01 Z0. F5.
G02 X0. Y0.5 I0.5 J0. F2.5
X0.5 Y0. I0. J-0.5
X0. Y-0.5 I-0.5 J0.
X-0.5 Y0. I0. J0.5
G01 Z0.1 F5.
G00 X0. Y0. Z0.25
|
1 |
G17G20G90G94G54 G0Z0.25X-0.5Y0. Z0.1 G01Z0.F5. G02X0.Y0.5I0.5J0.F2.5 X0.5Y0.I0.J-0.5 X0.Y-0.5I-0.5J0. X-0.5Y0.I0.J0.5 G01Z0.1F5. G00X0.Y0.Z0.25 |
Написание G-кода вручную даже для простых геометрических фигур достаточно утомительно, поэтому мы воспользуемся специальным программным обеспечением которое позволит нам генерировать G-код. В нашем проекте мы для этой цели использовали программное обеспечение «Inkscape», которое можно скачать по этой ссылке. Также вы можете скачивать уже готовые G-коды в интернете.
Программная среда Processing IDE для загрузки G-кода в Arduino
Программная среда с открытым исходным кодом Processing IDE поможет нам в загрузке G-кодов в плату Arduino. Для этого вам сначала необходимо скачать GCTRL.PDE file. После скачивания откройте этот файл в Processing IDE.
После этого нажмите “run” (запуск программы). На экране появится окно со всеми необходимыми инструкциями. Нажмите “p” на клавиатуре. Система попросит вас выбрать порт. Выберите порт, к которому подключена ваша плата Arduino. В нашем случае это порт 6.
Теперь нажмите “g” на клавиатуре и выберите папку на компьютере, где у вас хранится ваш G-код. Выберите необходимый файл с G-кодом и нажмите enter. Если все соединения в схеме у вас сделаны правильно, то вы заметите как устройство (плоттер) начнет рисовать на бумаге.
Если вы хотите остановить процесс рисования, то просто нажмите “x” и плоттер остановит свою работу.
Необходимые компоненты
Аппаратные компоненты
- Плата Arduino Uno (купить на AliExpress).
- Шилд (плата расширения) драйвера двигателей L293D (купить на AliExpress).
- Старый HP/Epson принтер. Можно использовать старый компьютерный DVD привод.
- Мини сервомотор (купить на AliExpress).
- Алюминиевый лист (710mm x 710mm).
- Органическое стекло.
- Болты и гайки.
- Ручка.

Примечание: механическая часть этого проекта может во многом отличаться от того, что вы видите на фотографиях в этой статье. Но какую бы “механику” вы не использовали, убедитесь что в ней есть сервомотор. Мы, к примеру, не смогли найти старый DVD привод, поэтому использовали части от старого принтера для конструирования нашего плоттера.
Программное обеспечение
Arduino IDE version 1.6.6 или новее Processing IDE version 3.1.1 или новее (последнюю версию можно скачать здесь) Inkscape version 0.48.5 или новее. (скачать здесь) Grbl controller (опционально)
Для любителей выжигать на различных материалах
В сети можно увидеть многочисленные самодельные модели выжигателей, которые способны создавать рисунок на фанере, пластике, металле и даже на стекле. Причем достигается фотографическая схожесть и некоторая объемность изображения. Поверхность очищают, обезжиривают, грунтуют белым акрилом марки Kudo и, применяя лазерный ЧПУ выжигатель, его ещё называют пиропринтер, создают уникальные изображения. Иногда процесс длится 6 и больше часов.
Скорость работы выжигателя – стабильная 10 м/мин, и у программистов есть идеи, как ее поднять, не вмешиваясь в работу блока управления. Управлять выжигателем можно и с ноутбука (ОС Windows XP и 7), отказавшись от LPT кабеля. Это превратит выжигание в увлекательное занятие для детей и подростков с применением возможностей лазерных фрезеров.
Работа плоттера с ЧПУ
Для работы плоттера с ЧПУ при построения графиков с ЧПУ требуется 3 оси (ось x, ось y и ось z). Оси x и y работают в унисон для создания 2D-изображения на обычной бумаге. Эти оси (x и y) расположены под углом 90 градусов друг к другу таким образом, что любая точка на плоской поверхности определяется заданным значением x и y. Ось z используется для подъема и опускания пера на плоскую бумагу.
В зависимости от того, какое изображение необходимо нарисовать, компьютер будет генерировать соответствующие координаты и отправлять их на микроконтроллер через USB-порт. Микроконтроллер интерпретирует эти координаты, а затем управляет положением двигателей для создания изображения. В качестве микроконтроллера в данном проекте мы использовали плату Arduino.
https://youtube.com/watch?v=a481L6ilmS4
https://youtube.com/watch?v=kGJP5l4hEWc
Что такое Arduino
Arduino — это бренд аппаратных и программных средств для построения и прототипирования простых систем, моделей и экспериментов в области электроники, автоматики, автоматизации процессов и робототехники.
Программная часть состоит из бесплатной программной оболочки (IDE) для написания программ, их компиляции и программирования аппаратуры.
Аппаратная часть представляет собой набор смонтированных печатных плат, продающихся как официальным производителем, так и сторонними производителями. Полностью открытая архитектура системы позволяет свободно копировать или дополнять линейку продукции Arduino.

Чаще всего термин «Ардуино» используют для обозначения контроллера с собственным процессором и памятью. Arduino пользуются большой популярностью среди начинающих инженеров и опытных энтузиастов, из-за низкой цены и простоты настройки.
Открытая архитектура плат Arduino позволяет проектировать микроконтроллеры людям с минимальным знанием электротехники. Существенным достоинством можно назвать и доступные в Интернете схемы и коды, созданные для различных типов станков.
К числу самых популярных у инженеров контроллеров Arduino принадлежат UNI, R3, Mega 2560 и Nano.
Трехкоординатный самодельный станок с ЧПУ
Следующая ступень сложности – трехкоординатный самодельный станок с ЧПУ. Сделать его своими руками несколько сложнее. Вопрос даже не в механике, а в более сложной схеме программирования.
Принцип третьей руки механической части заключается в том, что на каретку устанавливается еще один комплект направляющих. Теперь инструмент имеет три степени свободы: X, Y, Z.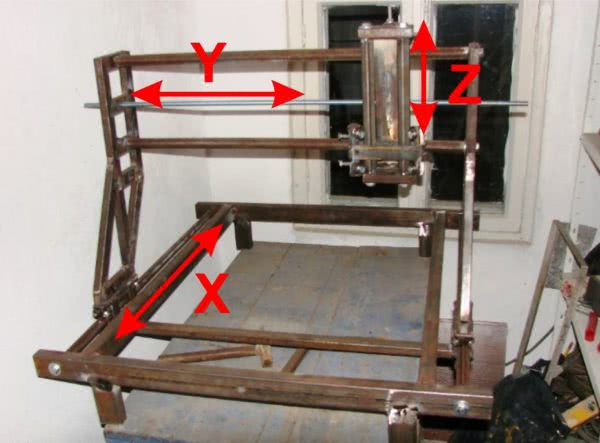
Что это дает? Во-первых, можно вырезать замкнутые фигуры в середине заготовки. Фреза установится над началом разреза, опустится на заданную глубину, пройдет по внутреннему контуру, и снова поднимется над плоскостью заготовки. По аналогичной схеме можно высверливать отверстия в заданных точках. Но самое главное – с помощью такого станка можно вырезать трехмерные фигуры.
Каретка перемещается вдоль направляющих с помощью шаговых двигателей. Сборка станка ЧПУ своими руками дает возможность выбора привода. Если приоритет в скорости – устанавливается ременный привод. Для высокой точности используется червячно-резьбовой.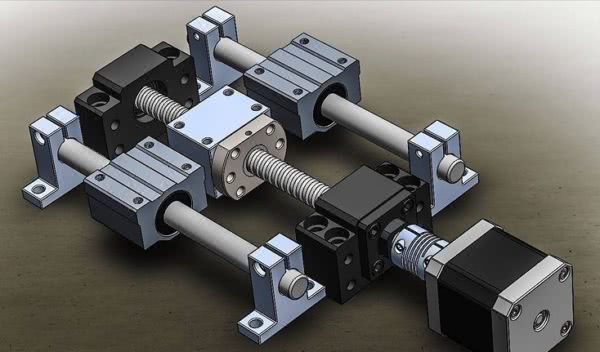
Чтобы изготовить своими руками ЧПУ станок, требуются чертежи и трехмерная модель с расчетом всех трех координат (осей перемещения).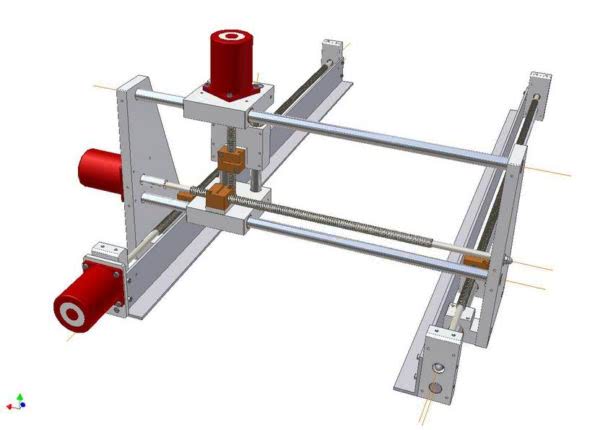 Лучше всего выполнить моделирование в профильной программе, например AutoCAD. Перед началом проектирования следует приобрести элементы, которые невозможно изготовить самостоятельно: узлы скольжения по направляющим, шаговые двигатели, приводные ремни.
Лучше всего выполнить моделирование в профильной программе, например AutoCAD. Перед началом проектирования следует приобрести элементы, которые невозможно изготовить самостоятельно: узлы скольжения по направляющим, шаговые двигатели, приводные ремни.
Сердцем такого станка является программируемый блок управления. Условно он состоит из трех частей:
- Модуль ввода, в который помещается схема обработки заготовки. Его роль может исполнять персональный компьютер
- Процессорный блок, преобразующий электронную модель изделия в команды для исполнительных механизмов
- Модуль управления исполнительными механизмами (шаговыми двигателями, рабочей головкой). Этот же блок принимает сигналы от датчиков позиционирования (при наличии таковых).
Механика
Для перемещения по осям Х и Y применены пары винт – гайка с резьбой. Применение резьбы с шагом 1 мм удобно тем, что за один оборот винта осуществляется перемещение на 1 мм. Учитывая, что для примененных шаговых электродвигателей требуется 48 импульсов на один оборот вала, то шаг перемещения по Х и по оси Z составил примерно 0,02 мм. Существует много факторов, из-за которых величина шага может отличаться от расчётного. Например, неровности винта, неточности в изготовлении деталей, люфт некоторых элементов и т.д. Поэтому в конструкции станка были приняты некоторые меры, для уменьшения влияния наиболее существенных из них (дополнительные самодельные полимерные гайки; плавающая посадка электродвигателей, позволяющая им при работе перемещаться в определенных пределах). Каретки для платы и узла сверления перемещаются вдоль осей Х и Y, соответственно, по направляющим из DIN-рейки. Вместе соприкосновения каретки для платы и направляющих для уменьшения трения применена фторопластовая лента.
Для оси Z применен имеющийся маломощный электродвигатель со встроенным редуктором. В связи с этим при применении пары винт – гайка получается слишком медленное перемещение. Т.к. высокая точность в данном случае не требуется, то вместо этого используется перемещение каретки, с установленным на ней электродвигателем, по неподвижно закрепленной капроновой нити. Для предотвращения поломок сверла, а также для определения расстояния до платы, например, при замене сверления фрезерованием, механизм сверления соединен с кареткой пружинным механизмом с возможностью регулировки усилия пружины. При соприкосновении сверла с поверхностью платы механизм сверления остановится, а каретка продолжит движение вниз, сжимая пружину. Небольшое сжатие пружины приведет к размыканию микропереключателя упора и посылке соответствующего сигнала в электрическую часть станка.
Перемещения по всем осям ограничены концевыми выключателями, подающими соответствующие электрические сигналы. Т.к. применяемые сверла могут иметь разную длину, предусмотрена регулировка положения верхнего (дискретно) и нижнего (плавно) концевых выключателей. Для остальных концевых выключателей регулировка положения не предусмотрена.
ПО
Тут есть варианты:
- Проще всего взять замечательную простенькую программу BenВox. Она специализирована именно под работы с ЧПУ и проста в установке и обращении. Минус этого варианта в его ограниченности. Во-первых прошивка для платы в комплекте ПО содержится уже в hex-файле, потому возникают проблем с ее редактированием. Да и функционал в общем не особо обширен, похож на простейший графический редактор. Если не хотите вдаваться в подробности работы всего этого механизма, то можно поработать с этим вариантом.
- Немного сложнее, но и перспективней работа через GRBL-прошивку. Эту библиотечку можно без проблем взять в интернете и она дает значительно больше возможностей, чем BenBox. Но для работы через этот механизм надо разобраться с начальной настройкой всего этого.
- Итак, скачиваем и распаковываем grbl-servo библиотеку. Теперь ее можно залить на плату через IDE, просто отыскав ее среди примеров.
- Для пересылки непосредственно команд устройству понадобится Universal Gcode Sender (или другое подобное ПО). После его установки на компьютер в нем открываем канал связи с платой по com-порту, к которому подсоединена плата.
- Для начальной и последующих настроек платы в командной строке приложения набираем «$$». По этой команде получаем полный набор базовых настроек платы, которые можно менять, настраивая нужные параметры. К примеру, команды «$110=380» и «$111=380» ставят скорость двигателей на осях Х и У на 380 мм\мин. Важными пунктами настройки являются скорость и ускорение двигателей, направление осей (прямое или инверсное). Подробнее инструкцию по такой настройке можно найти в интернете.
- Также есть возможность машинного контроля над двигателями (вкладка machine control) и серво (команды М5(поворот в начальное положение) и М3 s90(поворот на 90 или любое другое кол-во градусов)).
- Далее надо подготовить изображение для работы. Для этого тоже понадобится доп. ПО, к примеру, Inkscape. Оно похоже на любой другой графический редактор и подробно работу с ним можно изучить также в интернете. Но есть пара важных замечаний:
- Для начала надо задать правильные размеры страницы в свойствах, чтобы размеры вашего изображения не оказалось больше возможностей плоттера. Так же необходимо заменить пиксели на миллиметры в единицах измерения.
- После создания изображения жмем ctrl+shift+C и идем в меню — расширения — MI GRBL… — задаем скорости двигателей и угол поворота серво — сохраняем изображение в формате gcode.
- Наконец возвращаемся в Universal Gcode Sender и во вкладке File Mode открываем наше gcode-изображение. Кнопкой Visualize можно графически отслеживать работу программы, а в окне command Table можно проследить по командное выполнение. Осталось только запустить все это и наблюдать за результатом.
Сборка и загрузка прошивки для Ардуино
Теперь нажимаем кнопку Загрузить
. Дожидаемся, пока программа Ардуино проверит, откомпилирует и установит прошивку на плату Ардуино. Попробуем проверить, работает ли прошивка. Для этого необходимо подключить двигатели и запуститьМонитор порта в программе Ардуино. Монитор порта находится в пунктеСервис основного меню. На форме Монитора порта вводим команду:1000,2000,3000; И нажимаем кнопкуПослать . Смотрим, как двигатели вращаются с разной скоростью. Когда двигатели перестанут вращаться, прошивка Ардуино передастОК по USB компьютеру, это отобразится в Мониторе порта.
Разработка электроники с Arduino
Такая плата может быть самостоятельно собрана пользователем или покупается в сборе. Она способна принимать программное обеспечение компьютера. Arduino, упрощая работу с микроконтроллерами, имеет преимущества перед другими устройствами:
- низкую стоимость;
- кросс-платформенность (способность работать в нескольких ОС);
- простую, понятную среду программирования (подходит для новичка, а также опытного пользователя);
- в качестве основы Arduino применяются микроконтроллеры ATMEGA8 и ATMEGA168.
https://www.youtube.com/watch?v=EmBE2pq8zH0
Один из умельцев по схеме создал первый самодельный станок с ЧПУ из доступных материалов себестоимостью в пределах 170$. Его предназначение – резка пластика и фанеры, раскрой деталей для создания любой самоделки. Электронную часть собрано на arduino с прошивкой GRBL. Для этого понадобились главные узлы:
- платы Ардуина R3, cnc shield v3 Update или новая версия v4;
- ШД (тип NEMA 17);
- блок питания (24 В, 15 А).
Заготовил механику для самодельного ЧПУ своими руками, включая станину из фанеры толщиной 10 мм, шурупы и болты 8 мм. Чтобы сделать линейные направляющие, взял металлический уголок 25х25х3 мм и подшипники 8х7х22 мм. Движение оси Z на шпильке M8, а оси X и Y – зубчатые полиуретановые ремни T2.5. Использован самодельный шпиндель.
Рабочее пространство станка 45 см по X, 33 см по Y, 4 см по Z. Что касается фрезера, в Китае приобретено несколько фрез (3 и 4 канавки). Они идеальны для металла, а для фанеры (надо было вырезать шестерёнки) понадобились другие.
2 Рекомендации по сборке станка с ЧПУ
Для того, чтобы сделать представленный агрегат для резки фанеры или пенопласта своими руками, необходимо подготовить исходное оборудование. Для этого может быть пригоден бывший в употреблении сверлильный станок для печатных плат.
Это позволит двигаться рабочей фрезе в направлении двух плоскостей. Далее к конструкции подключается электроника, ключевым элементом которой является контроллер и платы «Arduino».
Схема сборки позволяет сделать своими руками самодельный агрегат ЧПУ автоматическим. Такое оборудование может быть предназначено для резки пластика, пенопласта, фанеры или тонкого металла. Для того, чтобы устройство смогло выполнять более сложные виды работ, необходим не только контроллер, но и шаговый двигатель.
Самодельный станок с ЧПУ
Он должен обладать высокими мощностными показателями – не менее 40-50 ватт. Рекомендуется использовать обычный электродвигатель, так как с его применением отпадет необходимость в создании винтовой передачи, а контроллер будет обеспечивать своевременную подачу команд.
Нужное усилие на вал передачи в самодельном устройстве должно передаваться посредством зубчатых ремней. Если для передвижения рабочей фрезы самодельный станок с ЧПУ будет использовать каретки от принтеров, то для этой цели необходимо выбрать детали от принтеров больших размеров.
Сварочные швы будут подвергаться деформации из-за постоянных нагрузок при работе станка. Элементы крепления при этом разрушаются, что приведет к сбою настроек, а контроллер будет работать некорректно.
2.1 О шаговых двигателях суппортах и направляющих
Агрегат с ЧПУ, собранный самостоятельно, должен быть оснащен шаговыми электродвигателями. Как уже упоминалось выше, для сборки агрегата лучше всего использовать двигатели от старых матричных принтеров.
Для эффективного функционирования устройства понадобится три отдельных двигателя шагового типа. Рекомендуется применять двигатели с пятью отдельными проводами управления. Это позволит увеличить функциональность самодельного аппарата в несколько раз.
При подборе двигателей для будущего станка нужно знать число градусов на один шаг, показатель рабочего напряжения и сопротивление обмотки. Впоследствии это поможет произвести корректную настройку всего программного обеспечения.
Деревянный станок с ЧПУ собранный своими руками
Крепление вала шарового двигателя производится с применением резинового кабеля, покрытого толстой обмоткой. Кроме того, с помощью такого кабеля можно присоединить двигатель к ходовой шпильке. Станину можно изготовить из пластмассы с толщиной в 10-12 мм.
Ведущие детали каркаса крепятся с помощью саморезов, а при использовании древесины можно крепить элементы клеем ПВА. Направляющие представляют собой стальные прутья с сечением в 12 мм и длиной в 20 мм. На каждую ось приходится по 2 прута.
Суппорт изготавливают из текстолита, его размеры должны составлять 30×100х40 см. Направляющие части текстолита скрепляются винтами марки М6, а суппорты «Х» и «У» в верху должны иметь 4 резьбовых отверстия для закрепления станины. Шаговые электродвигатели устанавливаются с помощью крепежей.
Крепления можно сделать с использованием стали листового типа. Толщина листа должна составлять 2-3 мм. Далее винт соединяется с осью шагового двигателя посредством гибкого вала. С этой целью можно задействовать обычный резиновый шланг.
Любое гаечное соединение рекомендуется производить с помощью чугунных гаек.
Похожие записи:
 Самодельная кабина на минитрактор своими руками
Самодельная кабина на минитрактор своими руками
 Инструкция по утеплению стен с внутренней стороны
Инструкция по утеплению стен с внутренней стороны
 Вертушка от кротов на участке своими руками
Вертушка от кротов на участке своими руками
 Diy: формочка для конфет или льда своими руками
Diy: формочка для конфет или льда своими руками
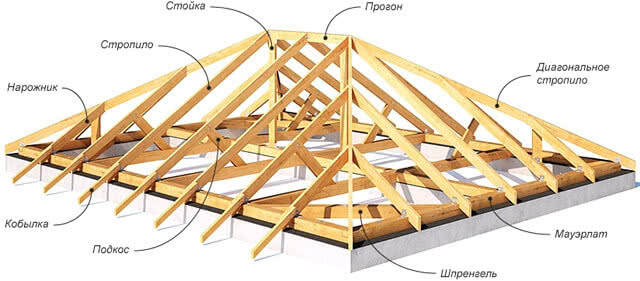 Всё о устройстве и конструкции вальмовой крыши + вентиляция мансарды и чердака четырехскатной кровли
Всё о устройстве и конструкции вальмовой крыши + вентиляция мансарды и чердака четырехскатной кровли
 Сеянный грунт: инструкция по выбору и использованию
Сеянный грунт: инструкция по выбору и использованию