Schematic
There are two parts to this circuit: 1. A microwave frequency transmitter/receiver/mixer and 2.a much lower frequency part based on an IC (marked RCWL-9196) which is very similar to the BISS0001 IC used in PIR motion detectors.
First the microwave part:
A critical function of a doppler radar is to be able to ‘mix’ the reflected signal with the transmitted signal to arrive at a frequency which is the difference between the transmitted and reflected signal. In this board Q1 also cleverly assumes the function of the mixer: .
The low doppler frequency difference is extracted by a low pass RC filter (C9 = 1nF, R3 = 1k, fc = 1/2πRC ≈ 160kHz) and amplified by the RCWL-9196 IC and treated exactly the same as a signal from a PIR sensor.
Update 4 Jan 2017: finally found the signal at 3.181GHz with the HackRF One SDR! One interesting observation: waving my hand in front of the sensor causes significant changes in the transmitting frequency, shifting by up to 1MHz. My theory: the low frequency doppler shift causes small changes in the transistor base bias. I used spice simulations to verify that small changes to transistor base bias causes changes in oscillation frequency. By running a few simulations I estimate that 1µV change in bias will change oscillation frequncy by 1.4MHz.
The low frequncy part
The core of the low frequncy signal processing is an IC marked RCWL-9196. The schematic says (in chinese) that it’s similar to a BISS0001 PIR IC. But there are differences. Unfortunately I can’t find any hard information (eg datasheet) on this. Nor can I find any information on the brand/company name «RCWL».
| Pin number | BISS0001 | RCWL-9196 |
|---|---|---|
| 1 | A Retriggerable & non-retriggerable mode select (A=1 : re-triggerable) | same |
| 2 | VO Detector output pin (active high) | same |
| 3 | RR1 Output pulse width control (Tx) | same? |
| 4 | RC1 Output pulse width control (Tx) | same? |
| 5 | RC2 Trigger inhibit control (Ti) | same? |
| 6 | RR2 Trigger inhibit control (Ti) | same? |
| 7 | Vss Ground | same |
| 8 | VRF RESET & voltage reference input (Normally high. Low=reset) | Vin (4 — 28V) |
| 9 | VC Trigger disable input (VC > 0.2Vdd=enable; Vc < 0.2Vdd =disabled) | same |
| 10 | IB Op-amp input bias current setting | ? |
| 11 | Vdd Supply voltage | 3.3V regulated output (100mA max?) |
| 12 | 2OUT 2nd stage Op-amp output | same |
| 13 | 2IN- 2nd stage Op-amp inverting input | same |
| 14 | 1IN+ 1st stage Op-amp non-inverting input | same |
| 15 | 1IN- 1st stage Op-amp inverting input | same |
| 16 | 1OUT 1st stage Op-amp output | same |
2Подключение и работа радара RCWL-0516
Сначала проверим работоспособность датчика RCWL-0516 без Arduino. Для индикации подключим к выходу OUT датчика светодиод. Когда датчик будет детектировать движение, на выходе OUT будет появляться напряжение 3.3 В, и светодиод будет загораться.
Схема подключения датчика RCWL-0516
А вот так это выглядит вживую:
Вывод срабатывания датчика RCWL-0516 на светодиод
Очевидно, что для чтения показаний датчика RCWL-0516 с помощью Arduino, достаточно прочитать логический уровень на любом входе. Например, будем использовать аналоговый вход A0. Но просто прочитать значение – слишком простая задача. Давайте будем передавать информацию о срабатывании датчика по радиоканалу на удалённое устройство. В роли удалённого устройства также будет Arduino. Радиоканал устроим с помощью уже известной нам пары XY-MK-5V и FS1000A (вот здесь и здесь).
Передатчик будет выглядеть так:
Передатчик показаний датчика RCWL-0516 на Arduino и FS1000A
Здесь данные с выхода OUT датчика RCWL-0516 поступают на аналоговый вход A0 Arduino. А выход TX (D0) последовательного порта Arduino идёт на ножку DATA передатчика. Питается и датчик движения, и передатчик напряжением с выхода 5V Arduino.
Для устойчивости радиоканала важно, чтобы по нему постоянно передавались данные. Причём это не должны быть одни нули
Допустим, когда датчик RCWL-0516 в состоянии ожидания, мы будем передавать по радио число 0xF0, а когда датчик фиксирует движение, будем передавать 0x0F. Когда датчик зафиксирует движение, также будем зажигать встроенный светодиод Arduino. Таким образом, скетч передатчика будет такой:
Скетч передатчика показаний датчика RCWL-0516 (разворачивается)
void setup() {
Serial.begin(9600);
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
int val = analogRead(A0);
if (val > 500){ // фиксация движения, на выходе HIGH
Serial.write(0x0F);
digitalWrite(LED_BUILTIN, HIGH);
}
else { // нет движения
Serial.write(0xF0);
digitalWrite(LED_BUILTIN, LOW);
}
}
Давайте сначала подключим приёмник к компьютеру с помощью преобразователя UART-USB и посмотрим, что вообще мы принимаем из радиоэфира (см. статью для подробностей).
Данные, принимаемые из радиоэфира
Видно, что в целом мы видим то, что и хотим увидеть: числа 0x0f и 0xf0. Но встречаются и искажения информации, вызванные шумами радиоэфира, от которых придётся избавляться. Самый простой способ – брать несколько соседних значений. И если они все равны ожидаемому, то считаем это за срабатывание. Поэтому скетч для приёмника будет несколько сложнее.
Продолжение следует…
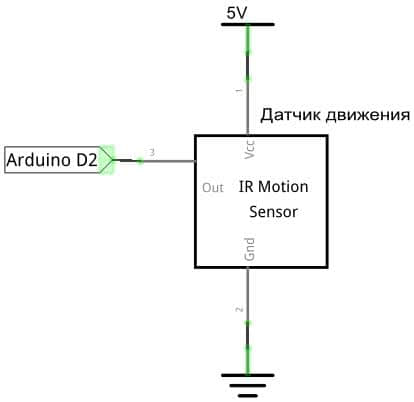
Схема микроволнового датчика движения
Наш датчик-это радар, основанный на эффекте Доплера, состоящий из электронного блока, показанного на схеме, в который мы собираемся вставить плату модуля датчика. Последний основан на микросхеме RCWL9196, которая взаимодействует с радиолокатором, собранном на генераторе Колпица на транзисоре Mmbr941m , который использует специально сформированную антенну на печатной плате. На рис. 1 показана схема датчика. Плату датчика можно увидеть на рис. 2.
Рис.1
Датчик имеет 5 выводов:
- OUT — выход датчика (устанавливается в «1» при наличии движений + задерживается на 2 секунды после их прекращения).
- VIN — вход напряжения питания, от +4 до +28 В постоянного тока.
- GND — вход питания (общий).
- 3V3 — выход стабилизированного напряжения питания 3,3 В (можно использовать для питания микроконтроллеров).
- COS- вход разрешения (подтянут внутренним сопростивлением чипа). Если на данном выводе установить уровень логического «0», то после сброса триггера, он не будет устанавливаться (датчик перестанет реагировать на движения).
- Если в зоне действия датчика нет объектов способных отражать радиоволны, то приёмник ничего не примет и датчик не сработает.
- Если в зоне действия датчика имеются неподвижные объекты способные отражать радиоволны, то приёмник примет радиоволну передатчика, отражённую от этих объектов, но частота принятой радиоволны будет равна частоте сигнала передатчика и датчик не сработает.
- Если в зоне действия датчика имеется объект способный отражать радиоволны, который приближается к датчику (движется), то приёмник примет отражённую от объекта радиоволну, частота которой будет выше чем у сигнала передатчика и датчик сработает.
- Если в зоне действия датчика имеется объект способный отражать радиоволны, который удаляется от датчика (движется), то приёмник примет отражённую от объекта радиоволну, частота которой будет ниже чем у сигнала передатчика и датчик сработает.
На плате устройства предусмотрено место для установки фоторезистора (CDS). Очевидно, данный датчик предназначен в первую очередь для управления освещением.
Рис. 2
Питание:
Напряжение питания от 4 до 28 В постоянного тока, подаётся на выводы «VIN» и «GND» модуля. Не подключайте питание к выходу «3V3» модуля. Вывод модуля «3V3» является выходом стабилизированного напряжения 3,3 В. От этого напряжения можно запитывать другие маломощные устройства, например, микроконтроллер.
Модуль собран на печатной плате с плоской антенной и содержащей генератор, радиочастотный смеситель и дискриминатор, обнаруживающий изменение радиоволны, вызванное присутствием движущегося человека в зонео бнаружения датчика. Ток потребления 3 мА, при напряжении питания 5 В. Дальность уверенного срабатывания около 1 м, если датчик располагается на полу и около 3 м, если датчик лежит на столе.
В RCWL9196 есть смеситель и дискриминатор сигнала и обеспечивает вывод высокого логического сигнала на контакт модуля при обнаружении движения.
Регулировка параметров:
C-TM- Конденсатор для регулировки времени удержания импульса. Время в секундах можно вычислить по формуле: T=(1/F)*32678
R-NG-Если нужно снизить дальность до 5м., добавляем резистор 1 МОм
CDS- Место для подключения фоторезистора (если необходимо, для управления светом)
R-CDS- Резистор для регулировки срабатывания фоторезистораВывод CDS- можно использовать для дистанционной установки фоторезистора, а так же для подбора переменным резисторомстепени освещенности при которой начинает работать датчик, потом этот номинал припаивается к R-CDS
Данный датчик можно приобрести на Алиэкспресс примерно за 60 рублей.
Список деталей для дачтика на RCWL-0516
C1: –
C2, C3, C18: 10 nF керамический
C4, C8, C10, C11, C13: 100 nF керамический
C15, C16, C17: 100 nF керамический
C5, C6, C7: 22 pF керамический
C9: 1 nF керамический
C12, C14: 33 pF керамический
R1, R10: 100 ом
R2: 10 ком
R3, R16, R18: –
R4, R13, R14, R15, R17: 1 Mом
R5, R6: 22 ком
R7: 56 ком
R8: 1 ком
R9: 220 ом
R11: 4,7 ком
R12: 2,2 ком
Q1:BFR520
U1:RCWL-9196
J1: 5 конаткный разъем (PLS)
RCWL-0516 может быть связан с Arduino или Fishino; в этом случае (как вы можете видеть из рис. 3) его можно использовать для автоматического открывания дверей или моторизованных ворот, автоматического включения-выключения света в комнатах или коридорах, а также создать аварийные системы безопасности.
Мы также можем использовать аналоговый выход RCWL-9196 и подключить его к одному из аналоговых входов Arduino, чтобы получить примерное измерение расстояния дообнаруженного человека, основанное на амплитуде выходного сигнала.
Пример работы
Рассмотрим ситуацию использования датчика на примере микроконтроллера Ардуино Уно и сенсора HC-SR501. Его характеристики:
- рабочее напряжение постоянного тока — 4.5–20 В;
- ток покоя — ≈ 50 мкА;
- выходное напряжение — 3.3 В;
- диапазон температур — от −15 до +70 градусов Цельсия;
- габариты — 32×24 мм;
- угол детектирования — 110 градусов;
- дистанция срабатывания — до 7 метров.
В указанном сенсоре установлены два пироэлектрических датчика IRA-E700.
Сверху они прикрыты сегментированной полусферой. Каждый сегмент — фокусирующая тепло на определенный участок ПИР-датчика линза.
Внешний вид устройства:

Общий пример работы мы уже рассматривали выше. Пока контролируемая зона пуста, датчики получают одинаковый уровень тепловой эмиссии, напряжение на них также одинаково. Но как только излучение от человека попадет последовательно на первый и второй элементы, схема зарегистрирует разнонаправленные электрические импульсы и сгенерирует сигнал на выход.
Настройка
ИК-модуль HC-SR501 весьма прост в настройке и дешев. У него есть перемычка для конфигурирования режима и пара подстроечных резисторов. Общая чувствительность настраивается первым потенциометром: чем она выше, тем шире зона «видимости» гаджета».

Другой потенциометр управляет временем срабатывания устройства: если обнаружено перемещение, на выходе создается положительный электрический импульс определенной длины (от 5 до 300 секунд).
Следующий управляющий элемент — перемычка. От нее зависит режим работы.
- в позиции L время отсчитывается от первого срабатывания. То есть, к примеру, если человек зайдет в помещение, система среагирует и включит свет на указанное настройкой потенциометра время. Когда оно истечет, выходной сигнал возвращается к начальному показателю, и комплекс перейдет в режим ожидания следующей активации;
- в позиции H обратный отсчет будет начинаться после каждого детектирования события движения, а любое перемещение станет обнулять таймер. В этом положении перемычка стоит по умолчанию.
Соединение датчика с контроллером
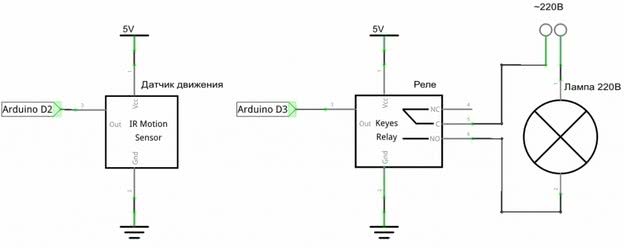
Подключение датчика движения к Ардуино следует выполнять по указанной схеме:
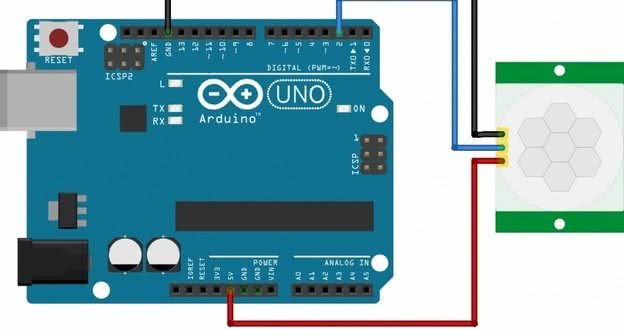
Пин OUT соединяется с пином 2 Уно, а VCC подсоединено к контакту +5 В. Принципиальная схема конструкции:
Программная часть
Помимо контроллера, для функционирования оборудования необходима управляющая аппаратным комплексом программа. Ниже приведен простой скетч:
В нем при обнаружении гаджетом движения на последовательный порт отправляется 1, а в ином случае уходит значение 0. Это простейшая программа, с помощью которой можно протестировать собранный датчик.
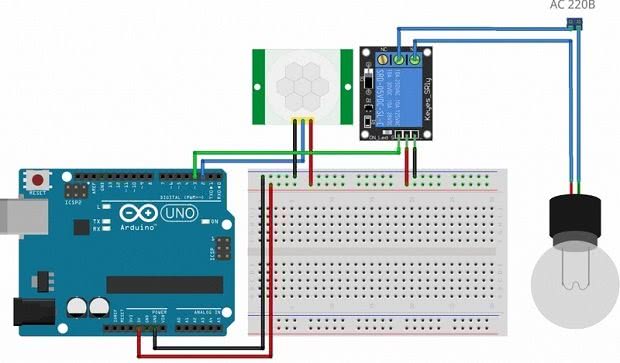
Модифицируем устройство добавлением реле, которое станет включать свет. Принципиальная схема подключения:
Макет:
Программа для реализации данного функционала:
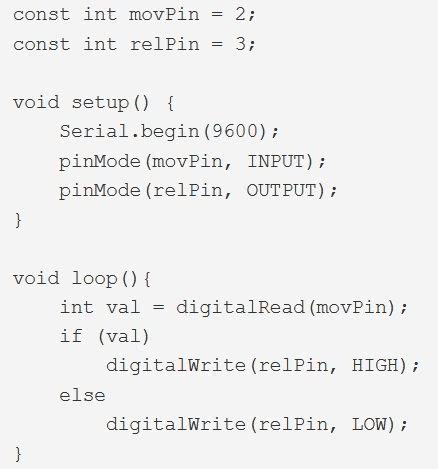
Теперь, если собрать компоненты по схеме, загрузить скетч в Ардуино и соединить систему с электросетью дома, по сигналу сенсора перемещения контроллер заставит сработать реле, а то, в свою очередь, включит свет.
Пример программы
Скетч представляет собой программный код, который помогает проверить работоспособность датчика движения после его включения. В самом простом его примере есть множество недостатков:
- Вероятность ложных срабатываний, за счет того, что для самоинициализации датчика требуется одна минута;
- Отсутствие выходных устройств исполнительного типа – реле, сирены, светоиндикации;
- Короткий временной интервал сигнала на выходе сенсора, который необходимо на программном уровне задержать, в случае появления движения.
Указанные недостатки устраняются при расширении функционала датчика.
Скетч самого простого типа, который может быть использован в качестве примера работы с датчиком движения на Arduino, выглядит таким образом:
Подключение PIR датчика движения
Большинство модулей с инфракрасными датчиками движения имеют три коннектора на задней части. Распиновка может отличаться, так что прежде чем подключать, проверьте ее! Обычно рядом с коннекторами сделаны соответсвующие надписи. Один коннектор идет к земле, второй выдает интересующий нас сигнал с сенсоров, третий — земля. Напряжение питания обычно составляет 3-5 вольт, постоянный ток. Однако иногда встречаются датчики с напряжением питания 12 вольт. В некоторых больших датчиках отдельного пина сигнала нет. Вместо этого используется реле с землей, питанием и двумя переключателями.
Для прототипа вашего устройства с использованием инфракрасного датчика движения, удобно использовать монтажную плату, так как большинство данных модулей имеют три коннектора, расстояние между которыми рассчитано именно под отверстия макетки.
В нашем случае красный кабель соответсвует питанию, черный — земле, а желтый — сигналу. Если вы подключите кабели неправильно, датчик не выйдет из строя, но работать не будет.
Тестирование PIR датчика движения
Соберите схему в соответсвии с рисунком выше. В результате, когда PIR датчик обнаружит движение, на выходе сгенерируется сигнал HIGH, который соответсвует 3.3 В и светодиод загорится.
При этом учтите, что пироэлектрический датчик должен ‘стабилизироваться’. Установите батарейки и подождите 30-60 секунд. На протяжении этого времени светодиод может мигать. Подождите, пока мигание закончится и можно начинать махать руками и ходить вокруг датчика, наблюдая за тем, как светодиод зажигается!
Настройка перезапуска датчика
У пироэлектрического датчика движения есть несколько настоек. Первой мы рассмотрим ‘перезапуск’.
После подключения, посмотрите на заднюю поверхность модуля. Коннекторы должны быть установлены в левом верхнем углу L, как это показано на рисунке ниже.
Обратите внимание, что при таком варианте подключения, светодиод не горит постоянно, а включается-выключается, когда вы двигаетесь возле него. Это опция ‘без перезапуска’ (non-retriggering)
Теперь установите коннектор в позицию H. После тестирования окажется, что светодиод горит постоянно, если кто-то движется в пределах зоны чувствительности датчика. Это режим ‘перезапуск’.
Рисунок ниже из даташита датчика BISS0001:
Для большинства случаев режим ‘перезапуск’ (коннектор в позиции H кк это показано на рисунке ниже) лучше.
Настраиваем чувствительность
На многих инфракрасных датчиках движения, в том числе и у компании Adafruit, установлен небольшой потенциометр для настройки чувствительности. Вращение потентенциометра по часовой стрелке добавляет чувствительность датчику.
Изменение времени импульса и времени между импульсами
Когда мы рассматривает PIR датчики, важны два промежутка времени ‘задержки’. Первый отрезок времени — Tx: как долго горит светодиод после обнаружения движения. На многих пироэлектрических модулях это время регулируется встроенным потенциометром. Второй отрезок времени — Ti: как долго светодиод гарантированно не загорится, когда движения не было. Изменять этот параметр не так просто, для этого может понадобится паяльник.
Давайте взглянем на даташит BISS:
На датчиках от Adafruit есть потенциометр, отмеченный как TIME. Это переменный резистор с сопротивлением 1 мегаом, который добавлен к резисторам на 10 килоом. Конденсатор C6 имеет емкость 0.01 микрофарат, так что:
Tx = 24576 x (10 кОм + Rtime) x 0.01 мкФ
Когда потенциометр Rtime в ‘нулевом’ — полностью повернут против часовой стрелки — положении (0 мегаом):
Tx = 24576 x (10 кОм) x 0.01 мкФ = 2.5 секунды (примерно)Когда потенциометр Rtime полностью повернут по часовой стрелке (1мегаом):
Tx = 24576 x (1010 кОм) x 0.01 мкФ = 250 секунд (примерно)
В средней позиции RTime время будет составлять около 120 секунд (две минуты). То есть, если вы хотите отслеживать движение объекта с частотой раз в минуту, поверните потенциометр на 1/4 поворота.
Для более старых/других моделей PIR датчиков
Если на вашем датчике нет потенциометров, можно провести настройку с помощью резисторов.
Нас интересуют резисторы R10 и R9. К сожалению, китайцы умею многое. В том числе и путать надписи. На рисунке выше приведен пример, на котором видно, что перепутаны R9 с R17. Отследить подключение по даташиту. R10 подключен к 3 пину, R9 — к 7 пину.
Tx is = 24576 * R10 * C6 =
R10 = 4.7K и C6 = 10 нанофарад
R9 = 470K и C7 = 0.1 микрофарад
Вы можете изменить время задержки установив различные резисторы и конденсаторы.
1Назначение и описание преобразователя уровня сигнала
Для коммуникации с цифровыми устройствами (датчиками, контроллерами и т.д.) и управления ими используется цифровой сигнал. Цифровой сигнал – это такой сигнал, в котором вся необходимая информация кодируется двумя уровнями напряжения, т.н. логическим нулём и логической единицей. За логический «0» обычно (но не обязательно) принимают напряжение 0 В, за логическую «1» – высокий уровень напряжения. Высокий он называется только относительно логического нуля. По факту это обычно довольно слабые напряжения. Самые распространённые на сегодня напряжения для передачи цифрового сигнала это 5 В и 3.3 В. Техника развивается, технологии изготовления цифровых устройств не стоят на месте. Поэтому в последнее время также встречаются более низкие напряжения 2.4 и 1.2 В. Подробнее о напряжениях, применяемых в цифровой технике, можно почитать здесь.
Если ваш микроконтроллер использует 5-вольтовую логику (как, например, Arduino), то нельзя просто взять и подключить к нему напрямую устройство, в котором применяется другой логический уровень. Для согласования уровней применяются специальные преобразователи напряжения.
В англоязычной литературе их могут называть по-разному: logic shifter, level shifter, level converter.
Они бывают одноканальные, но чаще встречаются многоканальные. Например, 2-канальные, 4-канальные, 8-канальные и другие. Число каналов показывает, сколько разных логических сигналов можно подключить к данному преобразователю. Например, если вы применяете 4-проводный интерфейс SPI для связи с вашим датчиком, то необходимо применять 4-канальный преобразователь.
Кроме того, бывают преобразователи однонаправленные и двунаправленные. Однонаправленные преобразователи уровня могут преобразовывать сигналы, идущие только в одну сторону, как правило, от контроллера к управляемому устройству. Двунаправленные преобразователи, соответственно, преобразуют сигнал и от контроллера к устройству, и в обратную сторону.
Пример 4-канального двунаправленного преобразователя уровня показан на фотографии. Его основной элемент – четыре транзистора BSS138, которые обеспечивают быструю коммутацию сигналов.
4-канальный преобразователь логического уровня на транзисторах BSS138
У показанного преобразователя есть два ряда контактов. С одной стороны подключаются сигналы низковольтового устройства (LV), с другой – сигналы высоковольтового (HV). К входам-выходам HV1…HV4 подключаются сигнальные линии высоковольтного устройства, а к входам-выходам LV1…LV4 – линии низковольтового устройства. К входу питания HV подключается питание высоковольтной части, к входу питания LV – питание низковольтной части схемы. Земля GND – общая.
Иногда каналы обозначаются не HV и LV, а по-другому. Например, A и B.
Как не сложно догадаться, сигналы необходимо подключать к соответствующим выводам. Например, если вы подключаете линию тактовой частоты контроллера к высоковольтному каналу HV3, то с другой стороны она будет выходить из канала LV3.
Ещё один пример преобразователя напряжения уровня – модуль HW-221 на основе микросхемы TXS0108E.
8-канальный преобразователь логического уровня на микросхеме TXS0108E
Здесь уже имеются 8 вводов-выводов. Причём к выводам со стороны порта A (A1…A8) должна подключаться низковольтовая логика, а к выводам B1…B8 – высоковольтная. Соответственно, питание VCCA должно быть от 1.4 до 3.6 В, а питание VCCB – от 1.65 до 5.5 В. Напряжение VCCA должно быть не больше, чем VCCB. Также на данном модуле присутствует вход разрешения работы OE. Работа разрешена при подключении его к питанию VCCA. При подключении OE к земле, все вводы-выводы переходят в третье состояние.
Принцип работы пироэлектрических (PIR) датчиков движения
PIR датчики не такие простые как может показаться на первый взгляд. Основная причина — большое количество переменных, которые влияют на его входной и выходной сигналы. Чтобы объяснить основы работы ПИР датчиков, мы используем рисунок, приведенный ниже.
Пироэлектрический датчик движения состоит из двух основных частей. Каждая из частей включает в себя специальный материал, чувствительный к инфракрасному излучению. В данном случае линзы особо не влияют на работу датчика, так что мы видим два участка чувствительности всего модуля. Когда датчик находится в состоянии покоя, оба сенсора определяют одинаковое количество излучения. Например, это может быть излучение помещения или окружающей среды на улице. Когда теплокровный объект (человек или животное), проходит мимо, он пересекает зону чувствительности первого сенсора, в результате чего на модуле ПИР датчика генерируются два различных значения излучения. Когда человек покидает зону чувствительности первого сенсора, значения выравниваются. Именно изменения в показаниях двух датчиков регистрируются и генерируют импульсы HIGH или LOW на выходе.
Конструкция PIR датчика
Чувствительные элементы ПИР датчика устанавливается в металлический герметический корпус, который защищает от внешних шумов, перепадов температур и влажности. Прямоугольник в центре сделан из материала, который пропускает инфракрасное излучение (обычно это материал на основе силикона). За этой пластиной устанавливаются два чувствительных элемента.
Рисунок из даташита Murata:
Рисунок из даташита RE200B:
На рисунке из даташита RE200B видно два чувствительных элемента:
На рисунке выше приведена внутренняя схема подключения.
Линзы
Инфракрасные датчики движения практически одинаковые по своей структуре. Основные отличия — чувствительность, которая зависит от качестве чувствительных элементов. При этом значительную роль играет оптика.
На рисунке выше приведен пример линзы из пластика. Это значит, что диапазон чувствительности датчика представляет из себя два прямоугольника. Но, как правило, нам нужно обеспечить большие углы обзора. Для этого можно использовать линзы, подобные тем, которые используются в фотоаппаратах. При этом линза для датчика движения должна быть маленькая, тонкая и изготавливаться из пластика, хотя он и добавляет шумы в измерения. Поэтому в большинстве PIR датчиков используются линзы Френеля (рисунок из Sensors Magazine):
Линзы Френеля концентрируют излучение, значительно расширяя диапазон чувствительности пиродатчиков (рисунок с BHlens.com)
Рисунок из Cypress appnote 2105:
Теперь у нас есть значительно больший диапазон чувствительности. При этом мы помним, что у нас два чувствительных элемента и нам нужны не столько два больших прямоугольника, сколько большое количество маленьких зон чувствительности. Для этого линза разделяется на несколько секций, каждая из которых представляет из себя отдельную линзу Френеля.
На рисунке ниже можно увидеть отдельные секции — линзы Френеля:
На этом макроснимке обратите внимание, что фактура отдельных линз отличается:
В результате формируется целый набор чувствительных участков, которые взаимодействуют между собой.
Рисунки из даташита NL11NH:
Ниже еще один рисунко. Более яркий, но менее информативный
Кроме того, обратите внимание, что у большинства датчиков угол обзора составляет 110 градусов, а не 90
Рисунок из IR-TEC:
1Описание, принцип действия и схема радара RCWL-0516
Датчик представляет собой модуль размером 35.9×17.3 мм и практически плоский, за исключением микросхемы BISS0001 (аналог RCWL-9196) на лицевой стороне и линейного стабилизатора напряжения 7133-1 на обратной. Благодаря линейному стабилизатору модуль можно питать напряжениями от 4 до 27 В, которое подаётся на вывод VIN. Внешний вид модуля приведён на фото.
Верхняя сторона датчика RCWL-0516
Обратите внимание, что вывод 3V3 – это не вход питания, а выход линейника! На него подавать ничего не нужно. Можно с него брать напряжение 3.3 В (потребители до 30 мА)
Микросхема BISS0001 – это т.н. PIR-контроллер. Аббревиатура PIR происходит от Passive Infra-Red, т.е. пассивный инфракрасный детектор. Дело в том, что изначально микросхема разрабатывалась как контроллер именно для инфракрасных детекторов движения.
Нижняя сторона датчика RCWL-0516
Датчик RCWL-0516 работает на эффекте Доплера. Напомню, эффект Доплера – это изменение частоты отражённой волны при движении наблюдаемого объекта. Модуль постоянно излучает в пространство радиоволновое излучение определённой частоты (около 3150 МГц). Отражаясь от объекта, волна возвращается и фиксируется датчиком. Если её частота несколько изменилась, значит, объект находится в движении.
В случае обнаружения движения датчик выставляет на выходе OUT логическую единицу (3.3 В). Причём датчик может работать в двух режимах: перезапускаемом (retriggerable) и неперезапускаемом (non-retriggerable).
- перезапускаемый режим – датчик будет держать на выходе OUT логическую единицу так долго, сколько будет фиксировать движение;
- неперезапускаемый режим – датчик будет держать на выходе OUT логическую единицу установленное время (от 2 до 300 секунд).
Режим задаётся так. Если на входе «1» микросхемы BISS0001 логическая единица – режим перезапускаемый, если логический ноль – неперезапускаемый. В данном модуле на входе «1» микросхемы 3.3 В, т.е. он работает в перезапускаемом режиме.
Для регулировки времени срабатывания триггера (времени удержания импульса на выходе OUT) служит место для конденсатора C-TM. Без установленного конденсатора время срабатывания триггера – 2 сек. Добавление ёмкости повысит длительность импульса триггера.
После срабатывания триггера датчик на некоторое время «слепнет». Такой же эффект происходит сразу после включения. Поэтому после включения датчику нужно дать время (обычно до 10 секунд) чтобы «успокоиться» и настроиться на окружающую обстановку.
Для регулировки дальности обнаружения датчика служит место для резистора R-GN. По умолчанию датчик настроен на максимальною дистанцию обнаружения 7…9 м. Добавление резистора сопротивлением 1 МОм снизит дистанцию примерно в 1.5…2 раза.
Вывод CDS соединён с выводом 9 микросхемы BISS0001, который позволяет отключить датчик (активация/деактивация). К этому выводу в параллель (на место CDS в углу платы на лицевой стороне модуля) можно подключить фоторезистор, который будет включать датчик только в тёмное время суток. А пока освещения достаточно, его сопротивление маленькое, и радиоизлучатель будет выключен. С помощью резистора на месте R-CDS можно регулировать порог срабатывания фоторезистора. Если же просто «посадить» выход CDS на землю, то датчик будет неактивен.
В приложении к статье можно скачать принципиальную схему и описание детектора RCWL-0516. Они сделаны для более ранней модификации данного модуля, но практически идентичны, за исключением нескольких деталей. Так, например, на схемах отсутствует линейный стабилизатор напряжения на входе питания. Но в измерительной части всё соответствует рассматриваемому устройству.
В документации приведена рекомендация по размещению датчика RCWL-0516. Датчик крепится на потолке помещения на высоте не более 7 метров.
Пример размещения датчика RCWL-0516 внутри помещения
Буквой L обозначен радиус действия радара. Естественно, это всё довольно условно, т.к. диаграмма направленности планарной антенны (а это именно тот тип антенны, который применяется у нас в датчике) несколько сложнее, чем полусфера, и она излучает в разных направлениях с разной мощностью. Но главная идея в том, чтобы обзор датчика был как можно шире, а перпендикуляр, проведённый из центра датчика, был направлен в центр области, которую необходимо контролировать.
Подключение PIR датчика движения к Arduino
Напишем программу для считывания значений с пироэлектрического датчика движения. Подключить PIR датчик к микроконтроллеру просто. Датчик выдает цифровой сигнал, так что все, что вам необходимо — считывать с пина Arduino сигнал HIGH (рбнаружено движение) или LOW (движения нет).
При этом не забудьте установить коннектор в позицию H!
Подайте питание 5 вольт на датчик. Землю соежинети с землей. После этого соедините пин сигнала с датчика с цифровым пином на Arduino. В данном примере использован пин 2.
Программа простая. По сути она отслеживает состояние пина 2. А именно: какой на нем сигнал: LOW или HIGH. Кроме того, віводится сообщение, когда состояние пина меняется: есть движение или движения нет.
* проверка PIR датчика движения
int ledPin = 13; // инициализируем пин для светодиода
int inputPin = 2; // инициализируем пин для получения сигнала от пироэлектрического датчика движения
int pirState = LOW; // начинаем работу программы, предполагая, что движения нет
int val = 0; // переменная для чтения состояния пина
pinMode(ledPin, OUTPUT); // объявляем светодиод в качестве OUTPUT
pinMode(inputPin, INPUT); // объявляем датчик в качестве INPUT
val = digitalRead(inputPin); // считываем значение с датчика
digitalWrite(ledPin, HIGH); // включаем светодиод
if (pirState == LOW) <
// мы только что включили
// мы выводим на серийный монитор изменение, а не состояние
digitalWrite(ledPin, LOW); // выключаем светодиод
if (pirState == HIGH)<
// мы только что его выключили
// мы выводим на серийный монитор изменение, а не состояние
Не забудьте, что для работы с пироэлектрическим датчиком не всегда нужен микроконтроллер. Порой можно обойтись и простым реле.