ШИМ сигнал в H-мосте
Рассмотрим нашу схему с точки зрения
нагрева транзисторов. Это один из
основных критериев, по которому наш
прибор может выйти из строя. Полевой
транзистор состоит из двух элементов
— собственно транзистор и паразитный
диод. В схеме управления мотором оба
элемента работают. Нагрев полевого
транзистора происходит в следующие
моменты времени:
-
когда транзистор открыт, нагрев
идёт из-за сопротивления в открытом
состоянии Rdson, пропорционально времени
открытия транзистора выделяется
мощность P = I * I * Rdson -
когда транзистор закрыт, то ток ЭДС
мотора идёт через диод, то есть нагрев
идет из-за диода P = I * U diode forward (как
правило 1В) -
когда транзистор переключается из
открытого состояния в закрытое, то
нагрев пропорционален времени открытия
и закрытия транзистора
Посмотрим, как влияет схема управления
на нагрев нашим электронных ключей.
Допустим, что мы управляем мотором ШИМ
сигналом со скважностью 50% и мотор
крутится в одну сторону. Самый простой вариант — применить
ШИМ сигнал к одному из двух транзисторов,
а второй оставить все время открытым.
Обычно, ШИМ в этом случае подаётся на
нижний транзистор (N типа), который обычно
быстрее
В этом случае нагрев нижнего
будет больше верхнего на величину тепла
выделяемого при переключениях транзистора.
Чтобы сравнять счёт, можно попеременно
подавать ШИМ сигнал то на верхний (если
они одинаковые), то на нижний транзистор.
Также можно подавать ШИМ на оба транзистора
одновременно, но из-за разницы в
транзисторах это будет не эффективно,
а также будет увеличивать нагрев за
счёт переключения транзисторов. При
такой схеме управления, два других
транзистора работают как диоды. К
счастью, наибольший ток через диод будет
при наибольшей скважности ШИМ, при этом
диод будет задействован очень малое
время
Самый простой вариант — применить
ШИМ сигнал к одному из двух транзисторов,
а второй оставить все время открытым.
Обычно, ШИМ в этом случае подаётся на
нижний транзистор (N типа), который обычно
быстрее. В этом случае нагрев нижнего
будет больше верхнего на величину тепла
выделяемого при переключениях транзистора.
Чтобы сравнять счёт, можно попеременно
подавать ШИМ сигнал то на верхний (если
они одинаковые), то на нижний транзистор.
Также можно подавать ШИМ на оба транзистора
одновременно, но из-за разницы в
транзисторах это будет не эффективно,
а также будет увеличивать нагрев за
счёт переключения транзисторов. При
такой схеме управления, два других
транзистора работают как диоды
К
счастью, наибольший ток через диод будет
при наибольшей скважности ШИМ, при этом
диод будет задействован очень малое
время
Для исключения тока через диоды,
которые дают существенный нагрев, можно
мотор никогда не отключать от напряжения,
а вместо этого, крутить его в обратную
сторону. Таким образом, мы должны,
например 70% ШИМ сигнала крутить вправо,
а 30% влево. Это даст в итоге 70%-30%=40% скорости
вправо. Но при этом не будут задействованы
диоды. Такой метод управления называется
комплиментарным. Такая схема требует
большого конденсатора на линии питания,
а также источника питания, который может
потреблять ток (например аккумулятора).
Вместо вращения мотора в разные
стороны, можно помогать диодам — а
именно тормозить мотор, открывать два
верхних транзистора в момент низкого
уровня ШИМ сигнала. На практике, все эти
методы не дают существенного изменения
скорости вращения двигателя, но позволяют
эффективно управлять нагревом полевых
транзисторов. Более подробно про
особенности различных схем управления
можно в этой статье.
На этом мы закончим нашу статью про
моторы. Теперь можно перейти к практике
— будем делать плату
управления 4-мя
моторами
для робота.
Повышающий стабилизатор
Импульсные повышающие стабилизаторы применяют вместе с нагрузками, разность потенциалов которых выше, чем напряжение на входе приборов. В стабилизаторе нет гальванической изоляции сети питания и нагрузки. Импортные повышающие стабилизаторы называются boost converter. Основные части такого прибора:
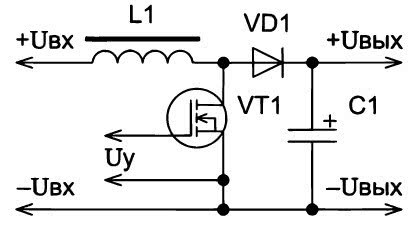
Транзистор вступает в насыщение, и ток проходит по цепи от положительного полюса по накопительному дросселю, транзистору. При этом накапливается энергия в магнитном поле дросселя. Нагрузочный ток может создать только разряд емкости С1.
Отключим выключающее напряжение с транзистора. При этом он вступит в положение отсечки, а следовательно на дросселе появится ЭДС самоиндукции. Оно будет коммутировано последовательно с напряжением входа, и подключено по диоду к потребителю. Ток пойдет по цепи от положительного полюса к дросселю, по диоду и нагрузке.
В этот момент магнитное поле индуктивного дросселя выдает энергию, а емкость С1 резервирует энергию для поддержки напряжения на потребителе после вхождения транзистора в режим насыщения. Дроссель является для резерва энергии и не работает в фильтре питания. При повторной подаче напряжения на транзистор, он откроется, и весь процесс пойдет заново.
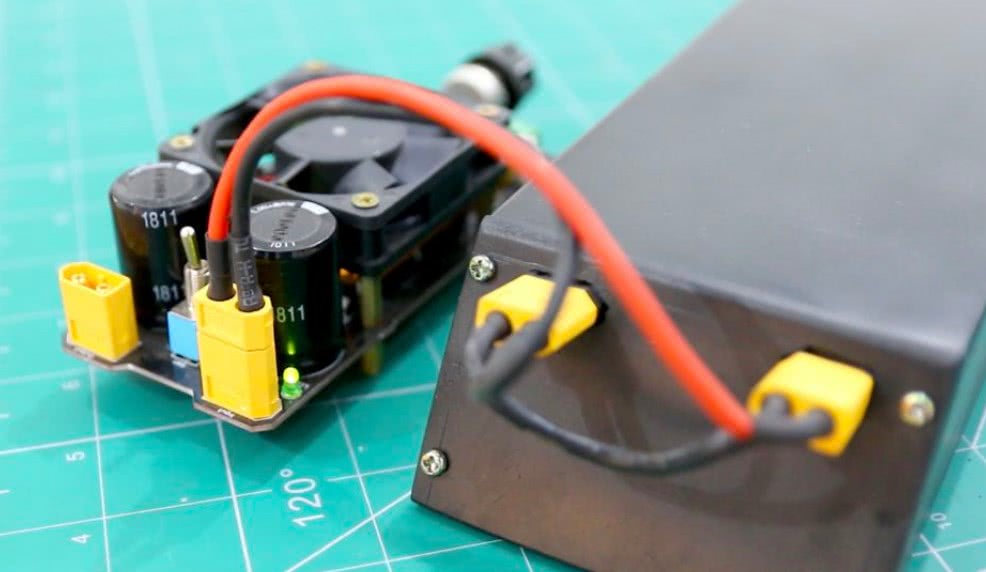
Тестирование ШИМ контроллера
Для тестирования контроллера будем использовать набор ячеек литиевых батарей с номинальным напряжением 80 В, которые применяются для данного электрического велосипеда. Контроллер временно подключен к аккумулятору и мотору, который прикреплен к велосипеду, чтобы приводить в движение заднее колесо. Поворачивая потенциометр по часовой стрелке, двигатель должен начать вращаться постепенно и увеличивать скорость, пропорциональную вращению ручки.
Чтобы проверить регулятор скорости на реальной нагрузке, надо смонтировать все на своем месте. Посмотреть как он держит нагрузку, вес, долгое время работы и воздействие атмосферной влажности (лучше покрыть плату лаком).
Как соединить 5 частей регулятора на 12 вольт.
Переменный резистор 10кОм.
Это переменный резистор 10ком. Изменяет силу тока или напряжений в электрической цепи, увеличивает сопротивление. Именно им регулируется напряжение.
Радиатор. Нужен для того, чтобы охладить приборы в случае их перегрева.
Резистор на 1 ком. Снижает нагрузку с основного резистора.
Транзистор. Прибор, увеличивает силу колебаний. В регуляторе он нужен, чтобы получить электрические колебания высокой частоты
2 проводка. Необходимы для того, чтобы по ним шел электрический ток.
Берем транзистор и резистор. У обоих есть 3 ответвления.
Проводятся две операции:
- Левый конец транзистора (делаем это алюминиевой частью вниз) присоединяем к концу, который находится в середине резистора.
- А ответвление середины транзистора соединяем с правым у резистора. Их необходимо припаять друг к другу.
Первый провод необходимо спаять с тем, что получилось во 2 операции.
Второй нужно спаять с оставшимся концом транзистора.
Прикручиваем к радиатору соединенный механизм.
Резистор на 1кОм припаиваем к крайним ножкам переменного резистора и транзистора.
Схема готова.
Регулировка
Теперь расскажем о том, как можно регулировать обороты коллекторных двигателей. В связи с тем, что скорость вращения мотора просто зависит от величины подаваемого напряжения, то любые средства регулировки, которые способны выполнять эту функцию для этого вполне пригодны.
Перечислим несколько такого рода вариантов для примера:
- Лабораторный автотрансформатор (ЛАТР).
- Заводские платы регулировки, используемые в бытовых приборах (можно использовать в частности те, которые применяются в миксерах или в пылесосах).
- Кнопки, используемые в конструкции электроинструментах.
- Бытовые регуляторы освещения с плавным действием.
Однако, все вышеперечисленные способы имеют очень важный изъян. Вместе с уменьшением оборотов, одновременно уменьшается и мощность работы мотора. В некоторых случаях, его можно остановить даже просто рукой. В некоторых случаях, это может быть приемлемо, но большей частью, это является серьёзным препятствием.
Хорошим вариантом является выполнение регулировки оборотов посредством использования тахогенератора. Его обычно устанавливают на заводе. При отклонениях в скорости вращения мотора, через симисторы в мотор передаётся уже откорректированное электропитание, соответствующее требуемой скорости вращения. Если в эту схему встроить регулировку вращения мотора, то потери мощности здесь происходить не будет.
Как это выглядит конструктивно? Наиболее распространены реостатная регулировка вращения, и сделанная на основе использования полупроводников.
В первом случае, речь идёт о переменном сопротивлении с механической регулировкой. Она последовательно подключается к коллекторному электродвигателю. Недостатком является дополнительное выделение тепла и дополнительная трата ресурса аккумулятора. При таком способе регулировк, происходит потеря мощности вращения мотора. Является дешёвым решением. Не применяется для достаточно мощных моторов по упомянутым причинам.
Во втором случае, при использовании полупроводников, происходит управление мотором путём подачи определённых импульсов. Схема может менять длительность таких импульсов, что в свою очередь, меняет скорость вращения без потери мощности.
Регулятор оборотов мощности
Принципы работы
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
https://youtube.com/watch?v=N8fTC5IOVFY
https://youtube.com/watch?v=qqljWixeLx0
Вращение вала
Двигатели делят на:
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
https://youtube.com/watch?v=XnuGxL9OmXE
https://youtube.com/watch?v=3YecjgtG9pQ
Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор. В основном регулировка двигателя начинается от 1000 оборотов.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм. Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.
https://youtube.com/watch?v=_6qFeiyYtvU
https://youtube.com/watch?v=nj6sHzeuGxQ
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Принципиальная схема регулятора оборотов мотора
Схема состоит из двух частей: дифференциального усилителя и стабилизатора напряжения. Первая часть занимается измерением температуры и обеспечивает напряжение, пропорциональное температуре, когда она превышает установленный порог. Это напряжение является управляющим для стабилизатора напряжения, выход которого контролирует питание вентиляторов.
Схема регулятора оборотов электродвигателя постоянного тока приведена на рисунке. Основа — компаратор U2 (LM393), работающий в этой конфигурации как обычный операционный усилитель. Первая его часть U2A работает как усилитель дифференциальный, чьи условия работы определяют резисторы R4-R5 (47k) и R6-R7 (220k). Конденсатор C10 (22pF) улучшает стабильность усилителя, а R12 (10k) подтягивает выход компаратора к плюсу питания.
На один из входов дифференциального усилителя подается напряжение, которое образуется через делитель, состоящий из R2 (6,8k), R3 (680 Ом) и PR1 (500 Ом), и фильтруется с помощью C4 (100nF). На второй вход этого усилителя поступает напряжение с датчика температуры, который в данном случае один из разъемов транзистора T1 (BD139), поляризованный небольшим током с помощью R1 (6,8k).
Конденсатор C2 (100nF) был добавлен, чтобы фильтровать напряжение с датчика температуры. Полярность датчика и делителя опорного напряжения задает стабилизатор U1 (78L05) вместе с конденсаторами C1 (1000uF/16V), C3 (100nF) и C5 (47uF/25V), предоставляя стабилизированное напряжение 5 В.
Компаратор U2B работает как классический усилитель ошибки. Он сравнивает напряжение с выхода дифференциального усилителя с выходным напряжением с помощью цепочки R10 (3,3k), R11 (47 Ом) и PR2 (200 Ом). Исполнительным элементом стабилизатора является транзистор T2 (IRF5305), база которого управляется делителем R8 (10k) и R9 (5,1k).
Конденсатор C6 (1uF) и C7 (22pF) и C9 (10nF) улучшают стабильность петли обратной связи. Конденсатор C8 (1000uF/16V) фильтрует выходное напряжение, он имеет значительное влияние на стабильность системы. Разъемом выхода — AR2 (TB2), а разъем питания — AR1 (TB2).
Благодаря применению выходного транзистора с низким сопротивлением в открытом состоянии, схема обладает очень малым падением напряжения — порядка 50 мВ при выходном токе 1 А, что не требует блока питания с более высоким напряжением для управления вентиляторами, работающие на 12 В.
В большинстве случаев в роли U2 можно применить популярный операционный усилитель LM358, правда несколько ухудшив выходные параметры.
Элементы платы
Драйвер двигателей
Драйвер моторов — это сборка из двух H-полумостов. В нашем модуле мы запараллели оба канала микросхемы H-моста для компенсации нагрева.
Нагрузка
В качестве нагрузки для модуля H-мост(Troyka модуль) рациональнее всего использовать коллекторный мотор, так как есть смысл и потребность менять направления вращения двигателя. Если у вас иная нагрузка, используйте силовой ключ или реле.
Мотор подключается своими контактами к колодкам под винт и . Полярность в данном случае неважна, так она влияет на направления вращения вала и её можно изменять программно.
Питание нагрузки
Источник питания для мотора (силовое питание) подключается своими контактами к колодкам под винт . Положительный контакт источника питания подключается к контакту , а отрицательный — к контакту . Напряжение питания моторов должно быть в пределах 3–12 В постоянного тока.
Контакты подключения трёхпроводных шлейфов
1-группа
- — направления вращения двигателя. Подключите к цифровому пину микроконтроллера.
- — питание логической части модуля. Соедините с питанием микроконтроллера.
- — земля. Дублирует пин из второй группы Troyka-контактов. Соедините с землёй микроконтроллера.
2-группа
- — включение и управление скоростью вращения мотора. Подключите к цифровому пину микроконтроллера.
- — силовое питание модуля. Подробнее про объединение питания.
- — земля. Дублирует пин из первой группы Troyka-контактов. Соедините с землёй микроконтроллера.
Джампер объединения питания
Силовое питание можно также подключать через пины и из второй группы Troyka-контактов. Для этого установите джампер объединения питания . При этом подключать питание к контактам и уже не нужно.
Внимание! Джампер объединения питания связывает пины с клеммником внешнего питания.
Если вы не уверены в своих действиях или боитесь подать слишком высокое напряжение с клемм H-моста на управляющую плату, не ставьте этот джампер!
Данный джампер будет полезен при установке H-моста на Troyka Slot Shield в пины поддерживающие .
Например, если на плату подаётся через разъём внешнего питания, то установив джампер на Troyka Slot Shield в положение вы получите напряжение и на ножке H-моста. Эти 12 В можно направить на питание нагрузки — просто установите джампер на H-мосте.
Световая индикация
Сдвоенный светодиод индикации скорости и направления вращения на плате.
При высоком логическом уровне на пине управления направлением вращения , индикатор светится красным светом. При низком уровне — зелёным.
Чем выше скорость вращения двигателя, тем ярче горит зелёный либо красный светодиод.
Регулятор оборотов
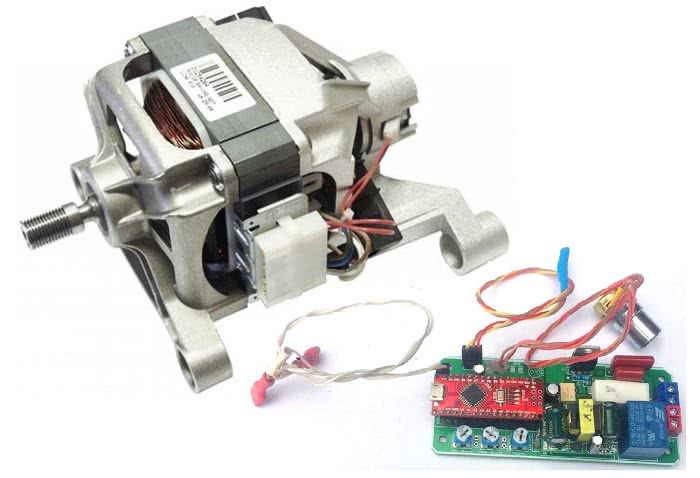
Понадобился регулятор оборотов коллекторного двигателя. Регулятор оборотов на Ардуино с поддержанием оборотов. Двигатель от стиральной машинки-автомата.
В схеме были сделаны небольшие изменения. Кое что выкинул. Некоторые компоненты заменены другими. Были добавлены 2 аналоговых входа, на них можно повесить датчик температуры и следить за температурой двигателя, и радиатора на котором сидит симистор управляющий двигателем.
Если вы выполняете кратковременные работы, то датчик температуры и не нужен. Ну а если двигатель будет много работать, то неплохо с помощью датчика, Ардуино следило за температурой, и при перегреве отключало двигатель пока тот не остынет.
На этом двигателе уже присутствует тахогенератор, но в моем случае он не работает — вышел из строя. Вместо тахогенератора буду устанавливать датчик холла. Выкидываем катушку нерабочего тахогенератора, оставляем только магнит на валу. Устанавливаю датчик холла на электродвигатель.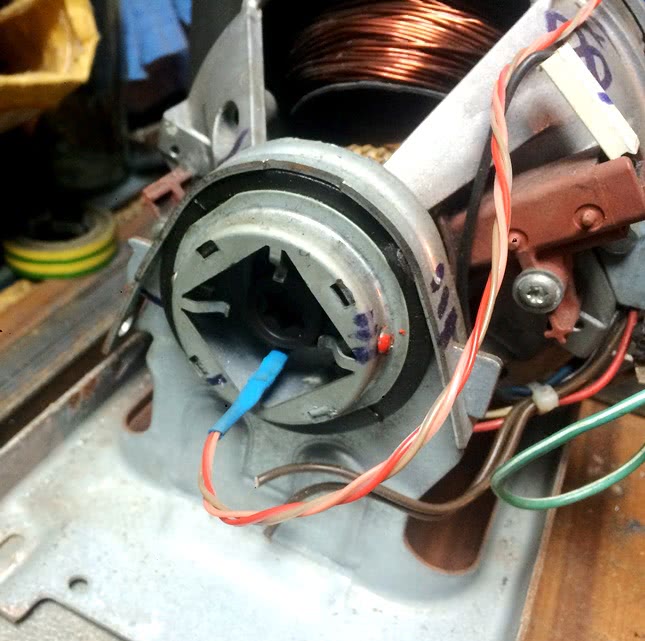
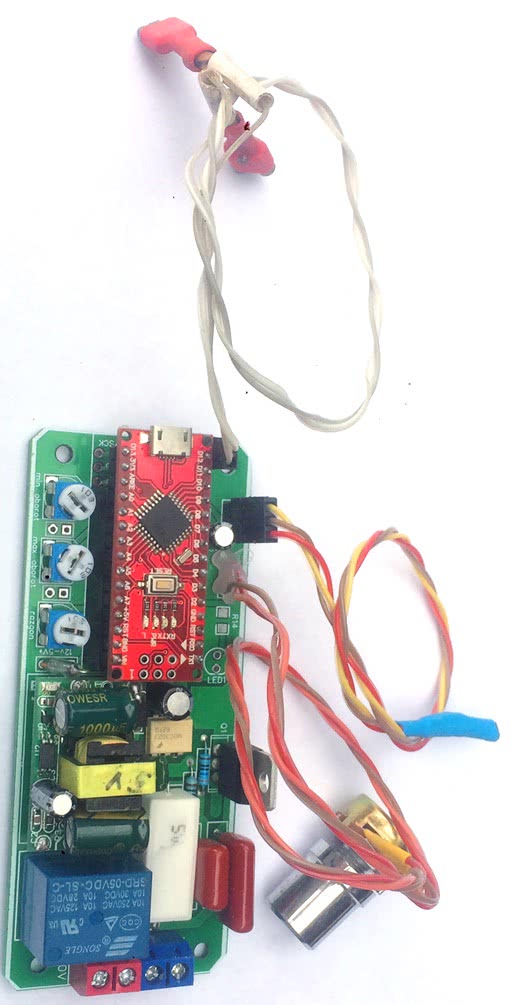
Схема регулятора оборотов будет содержать в себе:
- Ардуино Нано
- Блок настроек, и управления оборотами
- Силовая часть
- Датчика скорости
- Защита (реле)
- Дополнительные входы и выходы
Ардуино Нано будет контролировать и управлять силовой частью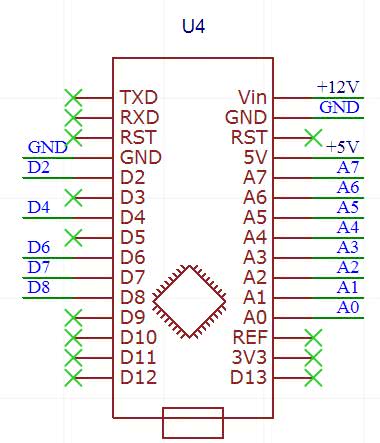
- А0 — регулировка оборотов двигателя
- А1 — настройка минимальных оборотов двигателя
- А2 — настройка максимальных оборотов двигателя
- А3 — выход управления симистором
- А4 — дополнительный аналоговый вход (не задействован)
- А5 — выход управления реле
- А6 — дополнительный аналоговый вход (не задействован)
- А7 — разгон или плавный старт
- D2 — сигнал перехода через ноль
- D4 — дополнительный выход
- D6, D7 — тахогенератор
- D8 — датчик холла
Блок настроек, и управления оборотами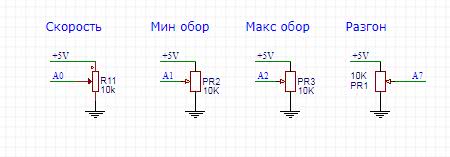
Силовая часть будет управлять двигателем. Разъем Р1 — для подключении к сети 220В. Р3 — для установки перемычки в зависимости от блока питания.
При установке блока питания с выходным напряжением 5 вольт, на разъеме Р3 нужно установить перемычку на контакты 2 и 3. При выходном напряжении блока питания 7-12 вольт перемычку устанавливаем на контакты 1 и 2.
Не забывайте, при выборе блока питания нужно учитывать, что реле питается выходным напряжением с блока питания. Поэтому выбирайте блок питания и реле на одно напряжение.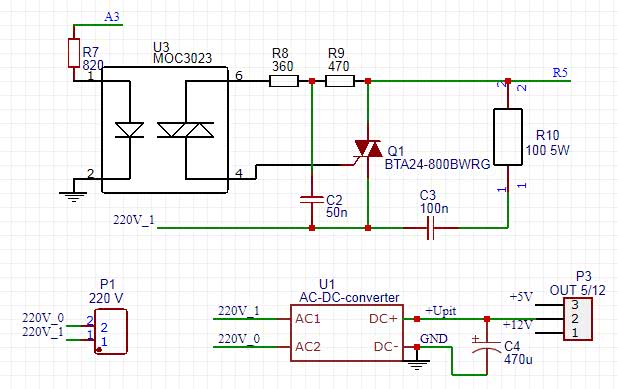
На выводы 220V0 И 220V1, подается сетевое напряжение 220 Вольт.
Схема будет питаться импульсным блоком питания с выходным напряжением 5 вольт. Импульсный блок питания, возьмём уже готовый. Так же схему можно питать от 7 до 12 вольт. На плате есть перемычка переключения напряжения 5/12v. Так же можно питать схему и зарядным от телефона, только проверьте выходное напряжение, там не должно быть выше 5 вольт.
При установки перемычки на 5 вольт напряжение поступает напрямую на шину +5 вольт. Реле надо будет установить на 5 вольт.
При установки перемычки на 12 вольт напряжение поступает на вход Ардуино Vin. В этом случае можно питать схему напряжением 7-12 вольт. но и реле должно быть на такое напряжение, какое выходит с блока питания.
Датчик скорости в двух исполнения. На тахогенераторе или на датчике холла.
Схема разрабатывалась так, что бы обороты можно было считывать с тахогенератора, уже установленные на двигателях машинок-автоматов. Разъем Р4 служит для подключения тахогенератора.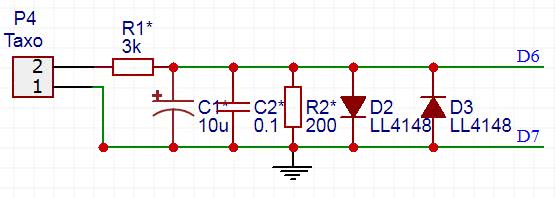
А так же при отсутствии или неисправности тахогенератора можно заменить на датчик холла. 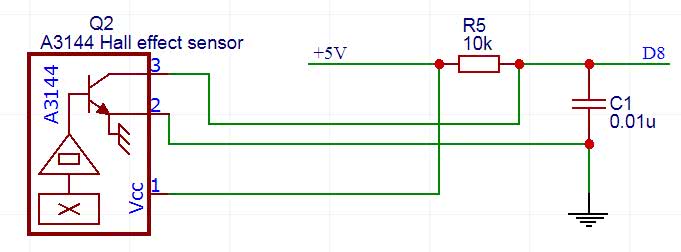
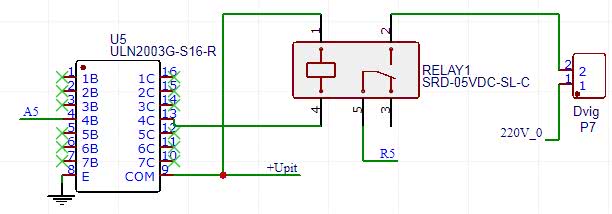
Реле служит защитой от пробоя симистора. Когда симистор пробивает, двигатель будет выходить на максимальные обороты, и это очень опасно . А что бы этого не случилось, контроллер отслеживает частоту вращения двигателя, и при превышении установленных оборотов реле отключает двигатель. Как обороты упадут ниже нормы, реле включится. Разъем Р7 — для подключения коллекторного электродвигателя.
Дополнительные входы и выходы
Иногда к устройству охота еще что нибудь прикрутить для удобства. Здесь добавлен дополнительный выход, он сейчас на плате указан как светодиод LED1. этот выход можно использовать под свои нужды. Можно пустить этот выход для управления вентилятором охлаждения двигателя и тд.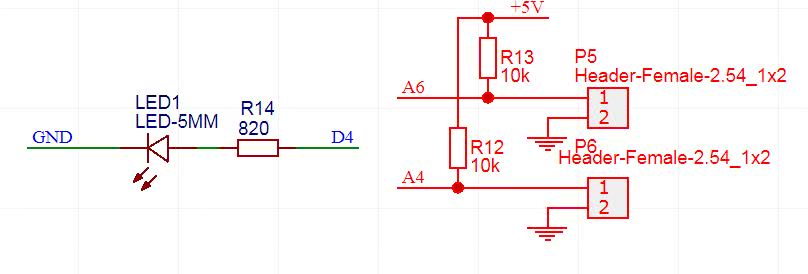
Еще есть два дополнительных аналоговых входа, которые тоже можно задействовать как писал выше, например контролировать температуру двигателя и симистора.
Верхний слой печатной платы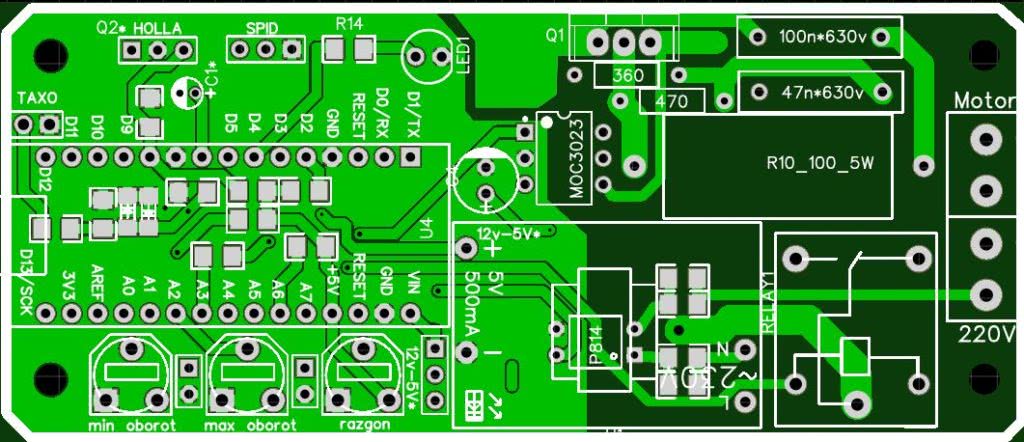
В конце статьи находится архив со всеми файлами для повторения данного проекта
Преимущества ОС-регулирования
Обратная связь при регулировании напряжения в ИС является важной опцией для импульсных стабилизаторов. Она позволяет поддерживать на выходе устройства напряжение стабильной величины, чутко следя за бросками напряжения и тока
В ИСН применяется широкополосная ОС (чем шире интервал частот, тем меньше уровень пульсации в результате).
Доступность на рынке радиодеталей комплектующих для построения ИСН даёт возможность собрать своими руками любую из схем импульсных стабилизаторов. Использование в них готовых стабилизаторов на интегральных микросхемах (ИМС) и ключей на полевых транзисторах делает устройство максимально компактным.
Регулятор оборотов своими руками: подробная инструкция как сделать, схемы, чертежи и примеры изготовления (95 фото + видео)
Широкое применение бытовых электроприборов и инструментов часто требует от них новых возможностей и способов применения. В электроинструментах и машинах различного рода применяются коллекторные электромоторы, скорость вращения которых необходимо регулировать, создавая различные режимы работы.

Например, при использовании болгарки скорость вращения диска рекомендуется менять при работе с материалами различной твердости и толщины.

- Регулировка оборотов электродвигателей повышает области их применения
- Продлить жизнь двигателя очень просто
- Регулятор для двигателей на 220 Вольт
- Стиральная машина – источник творчества
- Широкие возможности техники слабых токов
- Фото регулятора оборотов своими руками
Сравнение с линейным стабилизатором
Параметрический стабилизатор напряжения
Чтобы сравнить два принципа преобразования, нужно вспомнить, что линейные стабилизаторы (ЛС) – это обычно делитель напряжения. У него нестабильный потенциал подаётся на вход делителя, а стабильный – снимается со второго плеча (нижнего). Принцип стабилизации заключается в постоянном изменении сопротивления верхнего плеча схемы таким образом, чтобы на нижнем оно оставалось стабильным.
К сведению. Когда отношение Uвх/Uвых велико, то КПД линейного стабилизатора очень низкий. Это связано с потерями энергии на регулирующем резисторе. Он греется, оттого часть мощности на входе теряется.
У таких сборок есть свои плюсы, а именно: простота схемы, минимум элементов и неимение помех. По сравнению с линейными, импульсные стабилизаторы (ИС) сложнее, но работают стабильнее при правильно подобранной схеме.
В ИС могут возникать автоколебания, которые приводят к частичной неработоспособности или полному выходу преобразователя из строя. Это происходит в случае, когда импеданс источника Uвх превысит значение импеданса ИС, тогда при снижении Uвх повышается ток на входе.
Тестирование контроллера
Одним способом применения данного контроллера является плавное регулирование оборотов электродвигателя.
При этом можно не удалять штатную дискретную схему регулировки оборотов – она остаётся, не нарушается и продолжает работать.
Схема подключается лишь тремя проводами: плюс на 12 Вольт, масса и провод самого электродвигателя.
Также плату можно использовать для замены переключателя и гасящего резистора в родной схеме.
Первым делом при тестировании убедитесь, что все детали на своём месте и надёжно закреплены.
Дальше изготовленный ШИМ регулятор для двигателя электровелосипеда должен быть одновременно подключён и к аккумулятору, и к мотору велосипеда, что будет приводить его в движение.
Используйте набор ячеек литиевых батарей, номинальное напряжение которые составляет 80 Вольт (такие батареи как раз используются в электровелосипедах).
Поворачивая потенциометр по часовой стрелке, двигатель вашего велосипеда постепенно начнёт вращаться, а его скорость увеличиваться пропорционально вращению ручки.
Если всё в порядке, то ваш самодельный ШИМ контроллер собран правильно.
Рекомендую следующее видео, в котором автор изготавливает ШИМ регулятор своими руками:
https://youtube.com/watch?v=lsgi_hUlKDA
Цикл работы
Чтобы привести в движение трёхфазный двигатель, нужно рассмотреть цикл его работы за электрический оборот. Итак, имеем три фазы — A, B, C. Каждая из фаз получает положительную и отрицательную полярности в определённый момент времени. Поочерёдно по шагам пропускается ток от «плюса» одной фазы к «минусу» другой фазы. В итоге получается шесть шагов = три фазы × две полярности.
A+, A–, B+, B–, C+, C–
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
Как сделать диагностику без снятия?
Не рекомендуется проводить такую проверку, так как нет возможности оценить состояние щеточного узла. Но случаи бывают разные, поэтому даже такая диагностика может дать свои плоды. Для работы вам потребуется мультиметр или, если такового нет, лампа накаливания. Для вас главное – это провести замер напряжения в бортовой сети автомобиля, определить, нет ли скачков. Но их можно заметить и при езде. Например, мигание света при изменении оборотов коленчатого вала двигателя.
Но точнее окажутся измерения, проведенные с использованием мультиметра или вольтметра с растянутой шкалой. Заведите двигатель и включите ближний свет. Подключите мультиметр к клеммам аккумуляторной батареи. Напряжение не должно превышать 14,8 Вольт. Но и нельзя, чтобы оно опускалось ниже 12. Если оно находится не в дозволенном интервале, то имеется поломка регулятора напряжения. Не исключено, что нарушены контакты в местах соединения прибора с генератором, либо окислены контакты проводов.
Про ШИМ регулятор
ШИМ (PWM) регулятор широкого применения – устройство, разработанное для плавного включения, выключения и регулировки мощности, оборотов, яркости и другого.
Ранее для регулировки оборотов электродвигателей изменяли питающее напряжение. Однако в современной электротехнике от этого отказались. Теперь регулировка происходит путём подачи на электромотор импульсов тока, которые имеют разную длительность. Что и делают ШИМ (широтно-импульсно модулируемые) регуляторы, которые в последнее время становятся всё более и более популярными.
Схемы ШИМ контроллеров универсальны – подойдут и для регулировки яркости ламп, и для регулировки скорости оборотов мотора да хоть для регулирования силы тока в зарядном устройстве.
Сфера применения ШИМ регуляторов очень велика.
Обзор на плату
Собранная плата самодельного ШИМ регулятора:
Управление платы ручное и осуществляется переменным резистором или внешним напряжением в диапазонах:
0,45 В – устройство выключено, коэффициент заполнения – 0%
0,5/3,5 В – плавное регулирование, коэффициент заполнения от 0,1% до 99,9%
3,6 В – устройство включено, коэффициент заполнения – 100%
Устройство работает при постоянном напряжении от 10 до 28 Вольт.
Максимальное напряжение ограничено максимально допустимым напряжением силовых ключей, а также обратным напряжением мощного диода в нагрузке, при отдельном от дополнительного источника питания управления на 15 В.
Советую при напряжение не доходящим до 15 Вольт не устанавливать стабилизатор.
Вместо него лучше подойдёт какой-нибудь диод или обычная перемычка.
Если же напряжение от 15 до 28 Вольт, то стоит установить линейный (например, 7815) или импульсный стабилизатор в виде готового модуля на MP2307, при этом необходимо выставить на нём напряжение 15 Вольт.
Заказать их можно на всё том же Алиэкспрессе.
При необходимости вы можете регулировать частоту плавно переменным резистором.
Для этого нужно подключить его на плату вместо перемычки.
Похожие записи:
 Самодельная кабина на минитрактор своими руками
Самодельная кабина на минитрактор своими руками
 Инструкция по утеплению стен с внутренней стороны
Инструкция по утеплению стен с внутренней стороны
 Вертушка от кротов на участке своими руками
Вертушка от кротов на участке своими руками
 Мастер-класс изготовления игрового макета «улица города»
Мастер-класс изготовления игрового макета «улица города»
 Трафаретные рисунки на тему тюнинг авто. как сделать трафарет для аэрографии на авто своими руками
Трафаретные рисунки на тему тюнинг авто. как сделать трафарет для аэрографии на авто своими руками
 Муфельная печь своими руками: пошаговая фото инструкция по изготовлению печи для плавки
Муфельная печь своими руками: пошаговая фото инструкция по изготовлению печи для плавки