Обзор бесколлекторных моторов для Arduino
Бесколлекторные моторы (рис. 1) появились сравнительно недавно и были созданы с целью оптимизации электродвигателей постоянного тока. Бесколлекторные моторы питаются трехфазным переменным током. Они эффективно работают в более широком диапазоне оборотов и имеют более высокий КПД. При этом конструкция двигателя проще, в ней нет щеточного узла, который постоянно трется с ротором и создает искры. Поэтому они практически не изнашиваются.

Рис. 1.
По конструкции бесколлекторные моторы делятся на две группы: inrunner и outrunner. Двигатели inrunner имеют расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор. Двигатели outrunner имеют неподвижные обмотки, внутри двигателя, вокруг которых вращается корпус с помещенными на его внутреннюю стенку постоянными магнитами.
Коммутация в бесколлекторном двигателе (БД) осуществляется и контролируется с помощью электроники.
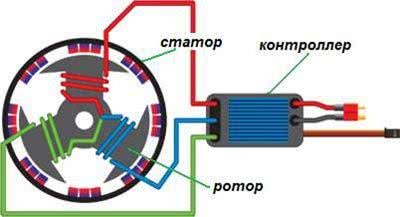
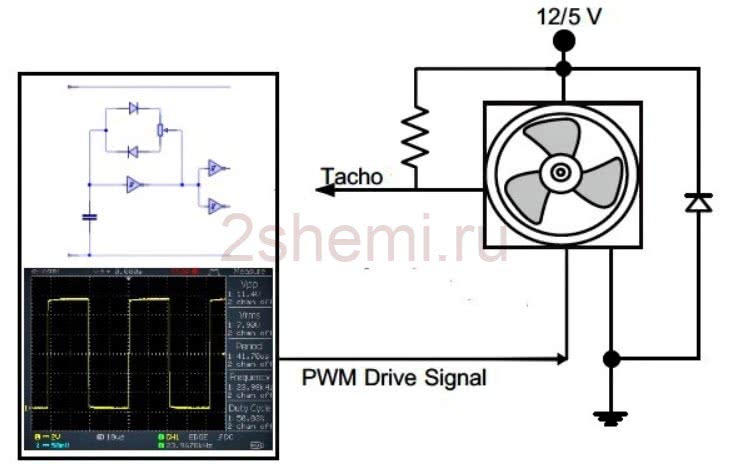
Рис. 2
Схема самодельного ШИМ контроллера кулера
Основной выход PWM подключен к силовому транзистору (T1) для управления нагрузкой 12 В. Как видите, дополнительный инвертированный выход ШИМ также доступен для других целей. На самом деле столь мощный транзистор TIP41C (T1) в этой конструкции немного излишний, можете выбрать другой.
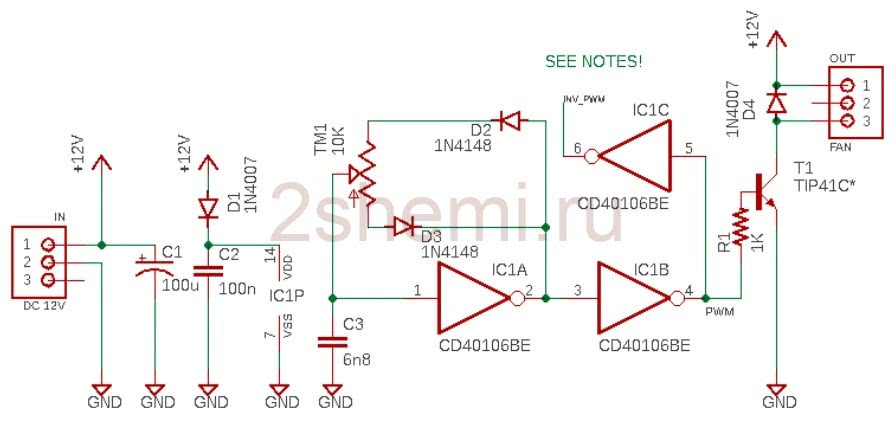
При экспериментах использовалась эта схема для «линейного» управления напряжением 2-проводного вентилятора 12V BLDC, и она работала отлично.
CD4016 (CD4016B / CD40106BE) содержит шесть инверторов, которые можно использовать для создания простых генераторов сигналов прямоугольной формы с одним резистором и конденсатором. Вход подключен к конденсатору, который идет на землю, а резистор идет от выхода. С помощью одного потенциометра и двух диодов можно изменить рабочий цикл или ширину импульса прямоугольной формы. Потенциометр изменяет способ прохождения обратной связи через два диода, что приводит к асимметричным колебаниям.
Представленная простая конструкция может использоваться для управления различными типами вентиляторов и ламп (в том числе светодиодных). Генератор прямоугольных сигналов CD40106 генерирует управляющий ШИМ на основе частоты и рабочего цикла, установленных соответствующими компонентами синхронизации RC. Конечный выходной сигнал может в дальнейшем использоваться разными способами, при условии что он настроен правильно для предлагаемого устройства.
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор – исток» и «затвор – сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Для контроля над биполярным транзистором двухтактный каскад не используется, так как управление осуществляется с помощью тока, а не напряжения. Для закрытия биполярного транзистора достаточно всего лишь прекратить протекание тока через базу. При этом замыкание базы на общий провод необязательно.
Шим регулятор на NE555
Регулировка оборотов электродвигателей в современной электронной технике достигается не изменением питающего напряжения, как это делалось раньше, а подачей на электромотор импульсов тока, разной длительности. Для этих целей и служат, ставшие в последнее время очень популярными — ШИМ (широтно-импульсно модулируемые) регуляторы. Схема универсальная — она же и регулятор оборотов мотора, и яркости ламп, и силы тока в зарядном устройстве.
Схема ШИМ регулятора
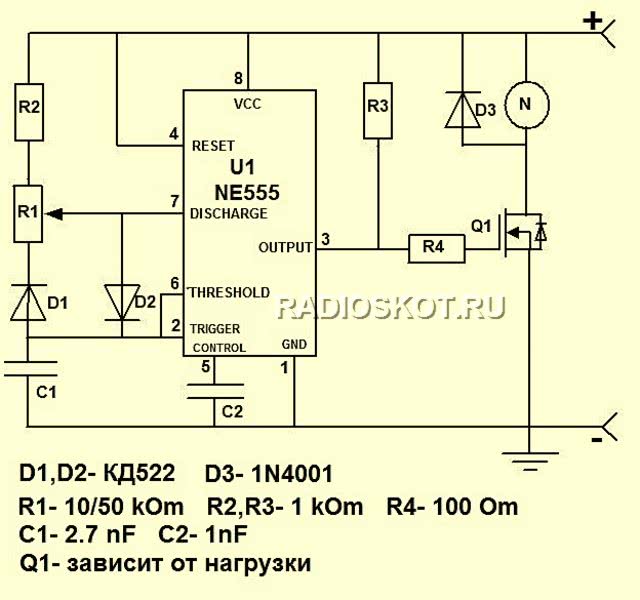
Указанная схема отлично работает, печатная плата прилагается.
Скачано: 90, размер: 6.8 KB, дата: 08 Мар. 2021
Без переделки схемы напряжение можно поднимать до 16 вольт. Транзистор ставить в зависимости от мощности нагрузки.

Можно собрать ШИМ регулятор и по такой электрической схеме, с обычным биполярным транзистором:
А при необходимости, вместо составного транзистора КТ827 поставить полевой IRFZ44N, с резистором R1 — 47к. Полевик без радиатора, при нагрузке до 7 ампер, не греется.
Работа ШИМ регулятора
Таймер на микросхеме NE555 следит за напряжением на конденсаторе С1, которое снимает с вывода THR. Как только оно достигнет максимума — открывается внутренний транзистор. Который замыкает вывод DIS на землю. При этом на выходе OUT появляется логический ноль. Конденсатор начинает разряжаться через DIS и когда напряжение на нем станет равно нулю — система перекинется в противоположное состояние — на выходе 1, транзистор закрыт. Конденсатор начинает снова заряжаться и все повторяется вновь. Заряд конденсатора С1 идет по пути: «R2->верхнее плечо R1 ->D2«, а разряд по пути: D1 -> нижнее плечо R1 -> DIS. Когда вращаем переменный резистор R1, у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе. Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1
Меняя отношение сопротивлений заряда/разряда — меняем скважность. Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором
Который не способен самостоятельно выставить высокий уровень.
Рекомендации по сборке и настройке
Диоды можно ставить любые, конденсаторы примерно такого номинала, как на схеме. Отклонения в пределах одного порядка не влияют существенно на работу устройства. На 4.7 нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно. Если после сборки схемы греется ключевой управляющий транзистор, то скорее всего он полностью не открывается. То есть на транзисторе большое падение напряжения (он частично открыт) и через него течет ток. В результате рассеивается большая мощность, на нагрев. Желательно схему параллелить по выходу конденсаторами большой емкости, иначе будет петь и плохо регулировать. Чтобы не свистел — подбирайте С1, свист часто идет от него. В общем область применения очень широкая, особенно перспективным будет её использование в качестве регулятора яркости мощных светодиодных ламп, LED лент и прожекторов, но про это в следующий раз.
5 / 5 ( 1 голос )
470
ОДНОТАКТНЫЕ ШИМ-КОНТРОЛЛЕРЫ ОБЩЕГО НАЗНАЧЕНИЯ
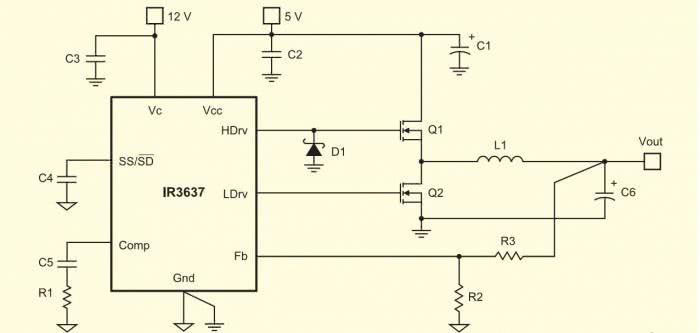
Данная группа является наиболее обширной среди всех ШИМ-контроллеров TI. В нее входят контроллеры, которые могут использоваться в изолированных и неизолированных топологиях импульсных преобразователей мощностью от 10 до 800 Вт, в которых используется один ключевой элемент. К числу поддерживаемых топологий относятся неизолированные повышающая и понижающая, изолированные прямоходовая и обратноходовая.
Рис. 2. Типичное применение UCC38083/4/5/6 в изолированном двухтактном преобразователе со средней точкой трансформатора
Большинство контроллеров данной группы поддерживают оба способа управления: по напряжению или току. Управление по напряжению является более простым и малошумящим способом управления, который отвечает широким требованиям по входному и выходному напряжению. Управление в токовом режиме отличается более высоким быстродействием и встроенной поддержкой ограничения тока.
Контроллеры также различаются степенью интеграции. Некоторые из них поддерживают возможность программируемого плавного старта, который делает прогнозируемым запуск преобразователя, и подавления импульсных скачков напряжения, вызванных включением МОП-транзистора.
В приложениях, где требуется незамедлительное реагирование на изменение входного напряжения, рекомендуется использовать контроллеры с управлением по напряжению и прямой связью по напряжению.
Некоторые контроллеры содержат мощные драйверы, что позволяет избавиться от необходимости применения внешних драйверов МОП-транзисторов.
Для приложений с питанием от сети переменного напряжения разработаны специальные контроллеры с пониженным уровнем пускового тока (все контроллеры, выполненные по технологии BiCMOS, и устройства с префиксом UCC). Эти же контроллеры характеризуются малым рабочим током, что улучшает кпд преобразования при малых уровнях нагружения.
Например, 8-выводные контроллеры семейства UCC3813, предназначенные для построения сетевых стабилизаторов и DC/DC-преобразователей с фиксированной частотой преобразования и управлением в токовом режиме, характеризуются типичным пусковым и рабочими токами 100 мкА и 500 мкА, соответственно.
На рис. 1 показан пример построения изолированного сетевого источника питания на основе еще одного 8-выводного BiCMOS ШИМ-контроллера UCC38C44, входящего в состав обширного семейства высококачественных ШИМ-контроллеров с управлением в токовом режиме UCC28C4x/UCC38C4x. Они различаются температурными диапазонами (соответственно, -40°C…105°C/ 0°C…70°C), максимальным заполнением импульсов (50% у C42,C43, C40 и 100% у С44, С45, С41), а также порогами блокировки/разблокировки защиты от снижения напряжения (9,0 В/14,5 В у С42, С44, 7,6 В/8,4 В у С43, С45, 6,6 В/7,0 В у С40, С41). Совместимость по расположению выводов со стандартными семействами UC384xA и UC384x делает возможным модернизацию существующих решений путем прямой замены на представителей семейств UCC28C4x/UCC38C4x, которые несут в себе преимущества повышенных до 1 МГц частот преобразования (снижение габаритов емкостных и индуктивных компонентов), улучшения КПД преобразования при малом нагружении и др.
Добиться еще меньших размеров преобразователя позволяют контроллеры с функцией плавного старта, которая позволяет существенно снизить требования к входному конденсатору. Данная функция поддерживается, например, семейством 8-выводных ШИМ-контроллеров UCC3800/1/2/3/4/5. Представители данного семейства, наравне с предыдущим, поддерживают цифровую фильтрацию на входе контроля тока (leading edge blanking), которая заключается в блокировке токового сигнала на заданное время (100 нс) после нарастающего фронта ШИМ-сигнала. Такая цифровая фильтрация позволяет исключить RC-компоненты цепи аналоговой фильтрации на входе контроля тока (CS).
Причины и области применения ШИМ
Принцип широтно-импульсной модуляции используется в регуляторах частоты вращения мощных асинхронных двигателей. В этом случае модулирующий сигнал регулируемой частоты (однофазный или трехфазный) формируется маломощным генератором синусоиды и накладывается на несущую аналоговым способом. На выходе получается ШИМ-сигнал, который подается на ключи потребной мощности. Дальше можно пропустить получившуюся последовательность импульсов через фильтр низкой частоты, например через простую RC-цепочку, и выделить исходную синусоиду. Или можно обойтись без нее – фильтрация произойдет естественным образом за счёт инерции двигателя. Очевидно, что чем выше частота несущей, тем больше форма выходного сигнала близка к исходной синусоиде.
Возникает естественный вопрос – а почему нельзя усилить сигнал генератора сразу, например, применением мощных транзисторов? Потому что регулирующий элемент, работающий в линейном режиме, будет перераспределять мощность между нагрузкой и ключом. При этом на ключевом элементе впустую рассеивается значительная мощность. Если же мощный регулирующий элемент работает в ключевом режиме (тринистор, симистор, RGBT-транзистор), то мощность распределяется во времени. Потери будут намного ниже, а КПД – намного выше.
В цифровой технике особой альтернативы широтно-импульсному регулированию нет. Амплитуда сигнала там постоянна, менять напряжение и ток можно лишь промодулировав несущую по ширине импульса и впоследствии усреднив её. Поэтому ШИМ применяют для регулирования напряжения и тока на тех объектах, которые могут усреднять импульсный сигнал. Усреднение происходит разными способами:
- За счет инерции нагрузки. Так, тепловая инерция термоэлектронагревателей и ламп накаливания позволяет объектам регулирования заметно не остывать в паузах между импульсами.
- За счёт инерции восприятия. Светодиод успевает погаснуть от импульса к импульсу, но человеческий глаз этого не замечает и воспринимает как постоянное свечение с различной интенсивностью. На этом принципе построено управление яркостью точек LED-мониторов. Но незаметное мигание с частотой несколько сот герц все же присутствует и служит причиной усталости глаз.
- За счет механической инерции. Это свойство используется при управлении коллекторными двигателями постоянного тока. При правильно выбранной частоте регулирования двигатель не успевает затормозиться в бестоковых паузах.
Поэтому ШИМ применяют там, где решающую роль играет среднее значение напряжения или тока. Кроме упомянутых распространенных случаев, методом PWM регулируют средний ток в сварочных аппаратах и зарядных устройствах для аккумуляторных батарей и т.д.
Если естественное усреднение невозможно, во многих случаях эту роль на себя может взять уже упомянутый фильтр низкой частоты (ФНЧ) в виде RC-цепочки. Для практических целей этого достаточно, но надо понимать, что без искажений выделить исходный сигнал из ШИМ с помощью ФНЧ невозможно. Ведь спектр PWM содержит бесконечно большое количество гармоник, которые неизбежно попадут в полосу пропускания фильтра. Поэтому не стоит строить иллюзий по поводу формы восстановленной синусоиды.
Очень эффективно и эффектно управление методом ШИМ RGB-светодиодом. Этот прибор имеет три p-n перехода – красный, синий, зеленый. Изменяя раздельно яркость свечения каждого канала, можно получить практически любой цвет свечения LED (за исключением чистого белого). Возможности по созданию световых эффектов с помощью PWM безграничны.
Наиболее употребительная сфера применения цифрового сигнала, промодулированного по длительности импульса – регулирование среднего тока или напряжения, протекающего через нагрузку. Но возможно и нестандартное использование этого вида модуляции. Все зависит от фантазии разработчика.
Что такое импульсный блок питания и где применяется
Что такое аттенюатор, принцип его работы и где применяется
Что такое частотный преобразователь, основные виды и какой принцип работы
Преобразователи напряжения с 12 на 220 вольт
Что такое диодный мост, принцип его работы и схема подключения
Что такое триггер, для чего он нужен, их классификация и принцип работы
Что такое ШИМ?
Для получения на выходе сигнала требуемой формы силовой ключ должен открываться всего лишь на определенное время, пропорциональное вычисленным показателям выходного напряжения. В этом и заключается принцип широтно-импульсной модуляции (ШИМ, PWM). Далее сигнал такой формы, состоящий из импульсов, разнящихся по своей ширине, поступает в область фильтра на основе дросселя и конденсатора. После преобразования на выходе будет практически идеальный сигнал требуемой формы.
Область применения ШИМ не ограничивается импульсными источниками питания, стабилизаторами и преобразователями напряжения. Использование данного принципа при проектировании мощного усилителя звуковой частоты дает возможность существенно снизить потребление устройством электроэнергии, приводит к миниатюризации схемы и оптимизирует систему теплоотдачи. К недостаткам можно причислить посредственное качество сигнала на выходе.
Необходимость установки
Обязательно используются контроллеры для схем, в которых присутствуют свинцово-кислотные АКБ. Это связано с тем, что такие элементы питания негативно воспринимают как перезаряд, так и значительное разряжение. В первом случае может произойти быстрый выход из строя батареи за счет закипания электролита или даже взрыва банок с ним. Во втором случае процесс приводит к разрушению пластин.
Нередко для импульсных источников питания или в источники бесперебойного питания встраивают PWM-элементы. Встречаются они и в инверторах.
Интегральный ШИМ-контроллер с токовым режимом управления в компактном корпусе TSOP-6
Обычно разъединение происходит при достижении двенадцативольтовым аккумулятором уровня 10,5 или 11 В. В таком случае за 10 часов непрерывной работы падение емкости составит со 100% до примерно 20%. В процессе более быстрого разряжения емкость будет уменьшаться.
В определенных условиях допускается коррекция напряжения отключения во время изготовления или настроечного процесса. Однако, на прилавках доминирует не регулятор напряжения, а прибор с типовым уровнем выходных параметров.
Ориентироваться по затратам поможет таблица:
| Блок | Период эксплуатации, лет | Стоимость (% от стоимости оборудования) |
| Солнечный потребитель | 25-30 | 20-30% |
| Контроллер заряда | 10 | 2-5% |
| АКБ | 2-6 | 45-60% |
| Дополнительное оборудование | более 10 | 10% |
Исходя из пропорций затрат, очевидно, что PWM-элементы не являются большой статьей затрат в схеме. При этом они играют важную роль в процессе обеспечения эффективности системы, продлевая срок службы остального оборудования.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.
Регулятор скорости вращения двигателя
ШИМ: 0%-99%, напряжение: 5…16 В, ток: 10A….
Регулятор оборотов коллекторного двигателя
Мощность: 400 Вт, обороты: 90-1400 об/мин, 220В/50Гц…
Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).
Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.
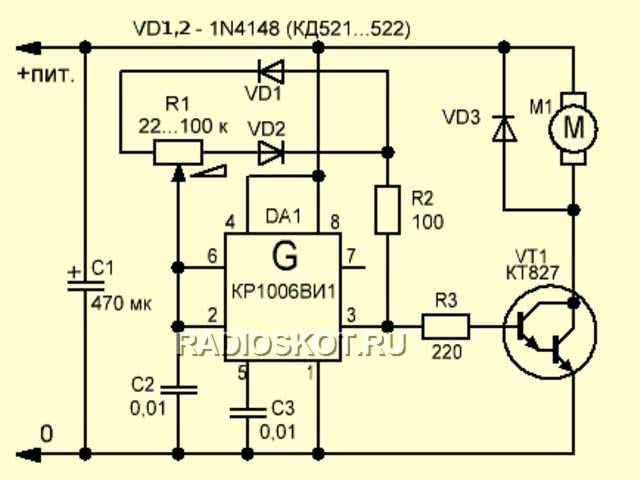
Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:
Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Причины распространения
Чем привлекает автолюбителей ШИМ-регулятор? Следует отметить стремление к увеличению КПД, когда проводится построение вторичных источников питания для электронной аппаратуры. Благодаря данному свойству можно данную технологию найти также при изготовлении компьютерных мониторов, дисплеев в телефонах, ноутбуках, планшетах и подобной техники, а не только в автомобилях. Также следует отметить значительную дешевизну, которой отличается данная технология при своём использовании. Также, если решите не покупать, а собирать ШИМ-регулятор собственноручно, то можно сэкономить деньги при усовершенствовании своего собственного автомобиля.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
Вывод питания (VC). Отвечает за электропитание схемы
Важно не спутать его с соседом с похожим названием – выводом VCC.
Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми)
В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Схема №1
Эта схема ШИМ-регулятора собиралась на инверторах КМОП-микросхемы. Она является генератором прямоугольных импульсов, который действует на 2-х логических элементах. Благодаря диодам здесь отдельно изменяется постоянная времени разряда и заряда частотозадающего конденсатора
Это позволяет менять скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке. В данной схеме возможно использование любых инвертирующих КМОП-элементов, а также ИЛИ-НЕ и И
В качестве примеров подойдут К176ПУ2, К561ЛН1, К561ЛА7, К561ЛЕ5. Можно использовать и другие виды, но перед этим придётся хорошо подумать о том, как правильно сгруппировать их входы, чтобы они могли выполнять возложенный функционал. Преимущества схемы – доступность и простота элементов. Недостатки – сложность (практически невозможность) доработки и несовершенство относительно изменения диапазона выходного напряжения.
Регулятор скорости двигателя постоянного тока с помощью 2 конденсаторов на 14 вольт.
Практичность таких двигателей доказана, они используются в механических игрушках, вентиляторах и др. У них малый ток потребления, поэтому требуется стабилизация напряжения. Часто возникает необходимость подстройки частоты вращения или изменения скорости двигателя для корректировки выполнения цели, представленной какому – либо типу электродвигателя любой модели.
Эту задачу выполнит регулятор напряжения, который совместим с любым типом блока питания.
Чтобы это осуществить, надо изменить выходное напряжение, не требующее большого тока нагрузки.
Необходимые детали:
- 2 Конденсатора
- 2 переменных резистора
Соединяем части:
- Подключаем конденсаторы к самому регулятору.
- Первый резистор подключается с минусом регулятора, второй на массу.
Теперь менять скорость двигателя у прибора по желанию пользователя.
Регулятор напряжения на 14 вольт готов.
Простой регулятор напряжения 12 вольт
Простейший регулятор оборотов электродвигателя своими руками
Изготавливая различные самоделки, приходится сталкиваться с рядом проблем и поиском их решений. Так и в случае с различными приспособлениями, которые имеют в своей конструкции коллекторный электродвигатель.
Очень часто нужно сделать так, чтобы двигатель имел регулируемые обороты. Для этих целей используется регулятор (контроллер) оборотов двигателя, который можно собрать своими руками.
Представленный ниже регулятор для электродвигателей позволяет не только обеспечить плавный пуск мотора и степень регулировки оборотов, но и защитить двигатель от перегрузок. Работать контроллер может не только от 220 Вольт, но и от пониженного напряжения, вплоть от 110 Вольт.
Разновидности 12В стабилизаторов
В зависимости от конструкции и способа поддержания 12-ти вольтного напряжения выделяют две разновидности стабилизаторов:
- Импульсные – стабилизаторы, состоящие из интегратора (аккумулятора, электролитического конденсатора большой емкости) и ключа (транзистора). Поддержание напряжения в заданном интервале значений происходит благодаря циклическому процессу накопления и быстрой отдачи заряда интегратором при открытом состоянии ключа. По конструктивным особенностям и способу управления такие стабилизаторы подразделяются на ключевые устройства с триггером Шмитта, выравниватели с широтно-импульсной и частотно-импульсной модуляцией.
- Линейные – стабилизирующие напряжение устройства, в которых в качестве регулирующего устройства применяются подключаемые последовательно стабилитроны или специальные микросхемы.
Откуда берётся ШИМ
Вариант 1 — аналоговый
ШИМ сигнал создаётся специально сконструированными устройствами – генераторами ШИМ сигнала или генераторами прямоугольных импульсов. Они могут быть собраны как на аналоговой базе, так и на основе микроконтроллеров, как в виде схемы из нескольких транзисторов, так и в виде интегральной микросхемы.
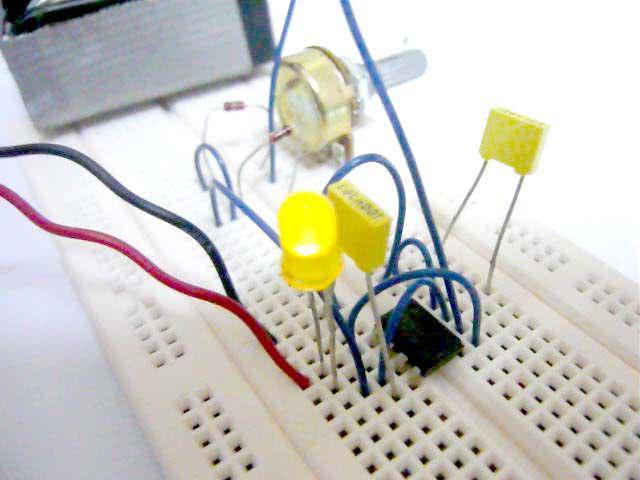
Самый простой вариант это микросхема NE555, собирается всё по схеме:
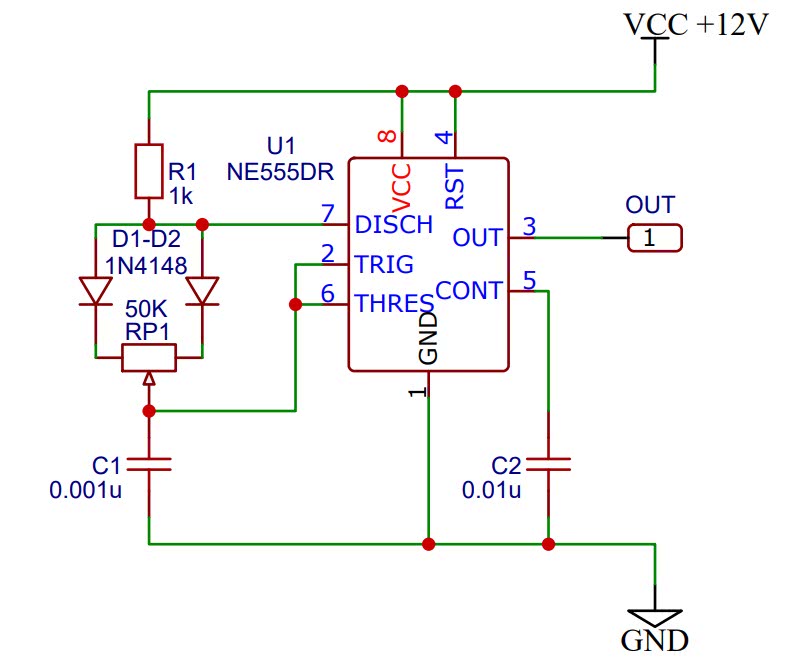
Схема ШИМ генератора на NE555
Но если лень разбираться и паять, то китайцы за нас всё уже давно сделали.
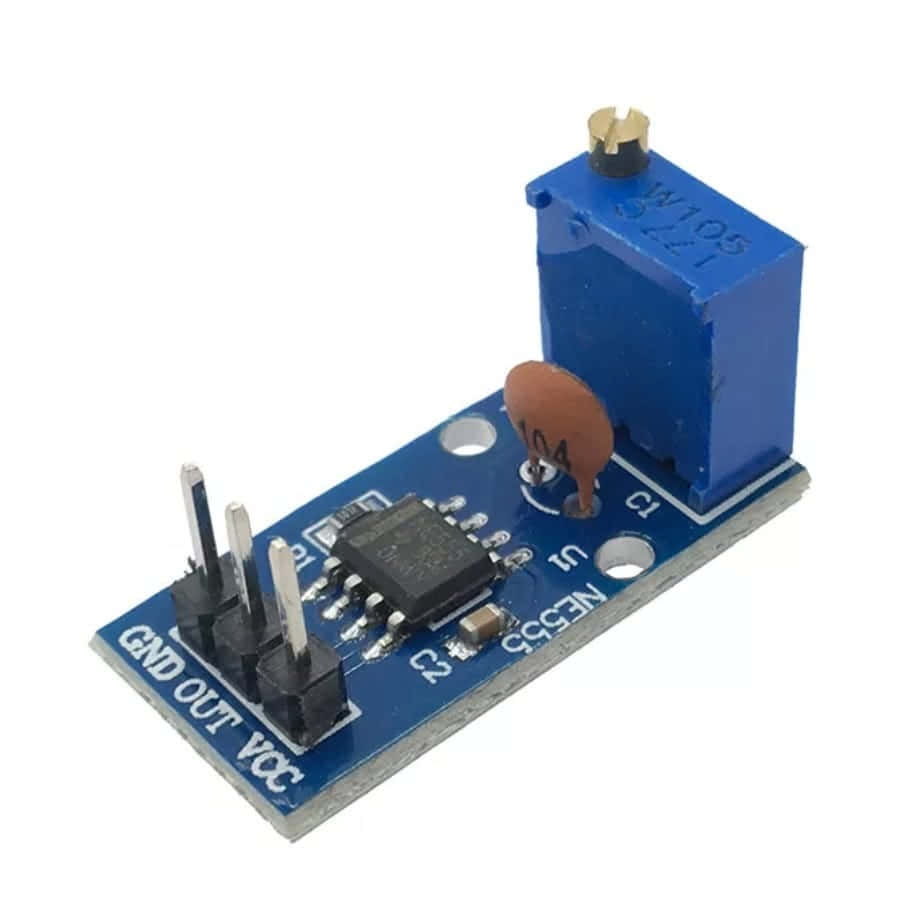
Стоит $0,5, работает стабильно при питании от 5 до 16 вольт
Выдаёт ШИМ сигнал амплитудой в 5 вольт, скважность можно менять подстроечным резистором (вон та синяя штуковина с вырезом под отвертку). При желании можно заменить подстроечный резистор на переменный и получим удобную ручку регулировки
Вариант 2 – цифровой
Более сложный для новичка – использование микроконтроллера, но вместе с тем более интересный и дающий широкие возможности. Звучит страшно, но самом деле реализуется довольно просто.
В качестве микроконтроллера удобнее всего взять отладочную плату ардуино.
Как с ней работать написано вот здесь. Подключаем ардуинку к компьютеру и заливаем в неё вот такой наисложнейший код:
void setup() {
pinMode(3,OUTPUT); // опреднляем пин D3 как выход
}
void loop() {
int duty = 30; // определяем скважность равной 30%
int value = 255/10*duty; // переводим значение скважности в 8 битный формат
analogWrite(3, value); // выводим ШИМ значением value на пин D3
1
2
3
4
5
6
7
voidsetup(){
pinMode(3,OUTPUT);// опреднляем пин D3 как выход
}
voidloop(){
intduty=30;// определяем скважность равной 30%
intvalue=25510*duty;// переводим значение скважности в 8 битный формат
analogWrite(3,value);// выводим ШИМ значением value на пин D3
Далее цепляемся осциллографом к пину D3 и видим:
ШИМ скважность 30%
Сигнал частотой (Freq) -526 Гц, амплитудой (Vmax)- 5 вольт и скважностью (duty) – 30.9 %. Меняем скважность в коде — меняется и скважность на выходе
Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью
Меняем скважность в коде — меняется и скважность на выходе. Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью
Преимущества ОС-регулирования
Обратная связь при регулировании напряжения в ИС является важной опцией для импульсных стабилизаторов. Она позволяет поддерживать на выходе устройства напряжение стабильной величины, чутко следя за бросками напряжения и тока
В ИСН применяется широкополосная ОС (чем шире интервал частот, тем меньше уровень пульсации в результате).
Доступность на рынке радиодеталей комплектующих для построения ИСН даёт возможность собрать своими руками любую из схем импульсных стабилизаторов. Использование в них готовых стабилизаторов на интегральных микросхемах (ИМС) и ключей на полевых транзисторах делает устройство максимально компактным.
Похожие записи:
 12 вольт из блока питания от компьютера
12 вольт из блока питания от компьютера
 Квадроцикл своими руками из мт
Квадроцикл своими руками из мт
 Колонки своими руками, акустическая система, динамики, домашняя акустика
Колонки своими руками, акустическая система, динамики, домашняя акустика
 Diy: формочка для конфет или льда своими руками
Diy: формочка для конфет или льда своими руками
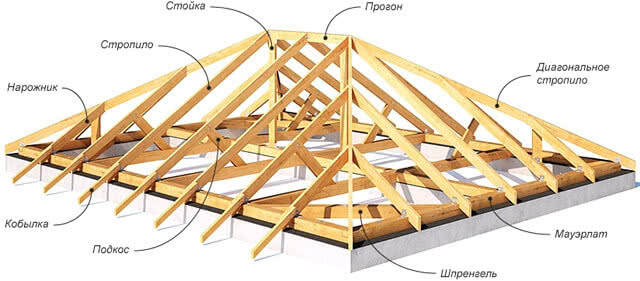 Всё о устройстве и конструкции вальмовой крыши + вентиляция мансарды и чердака четырехскатной кровли
Всё о устройстве и конструкции вальмовой крыши + вентиляция мансарды и чердака четырехскатной кровли
 Сеянный грунт: инструкция по выбору и использованию
Сеянный грунт: инструкция по выбору и использованию